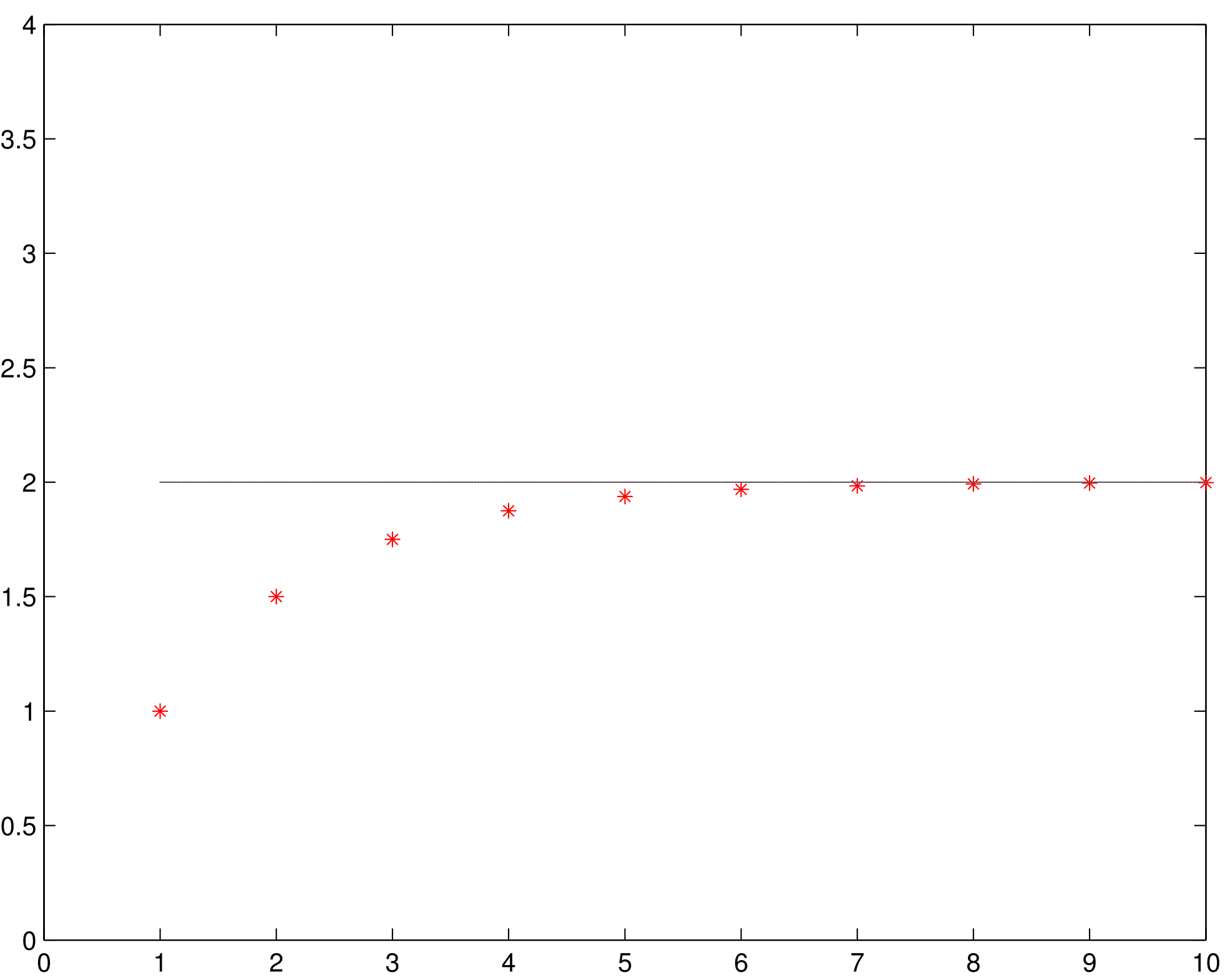
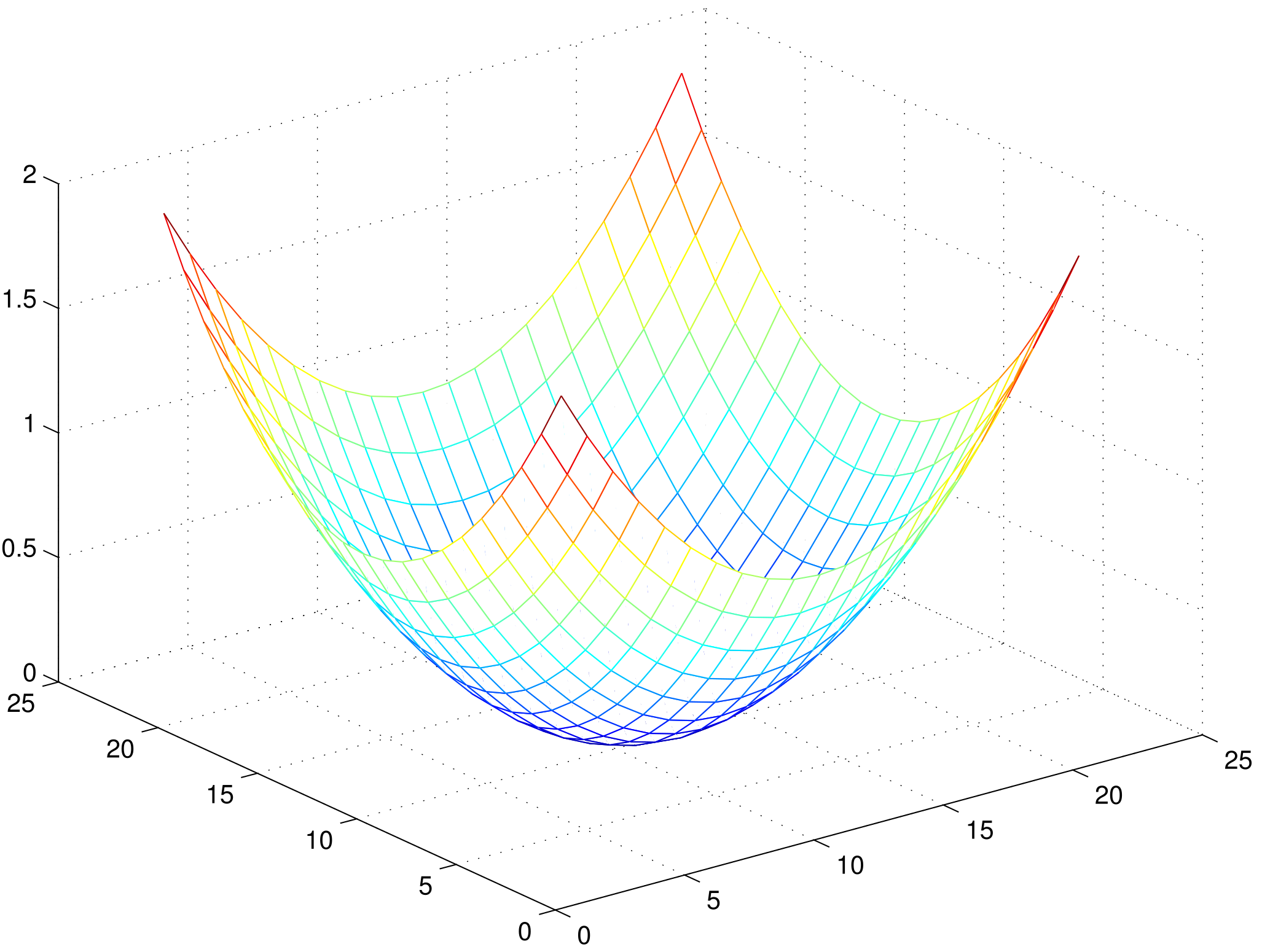
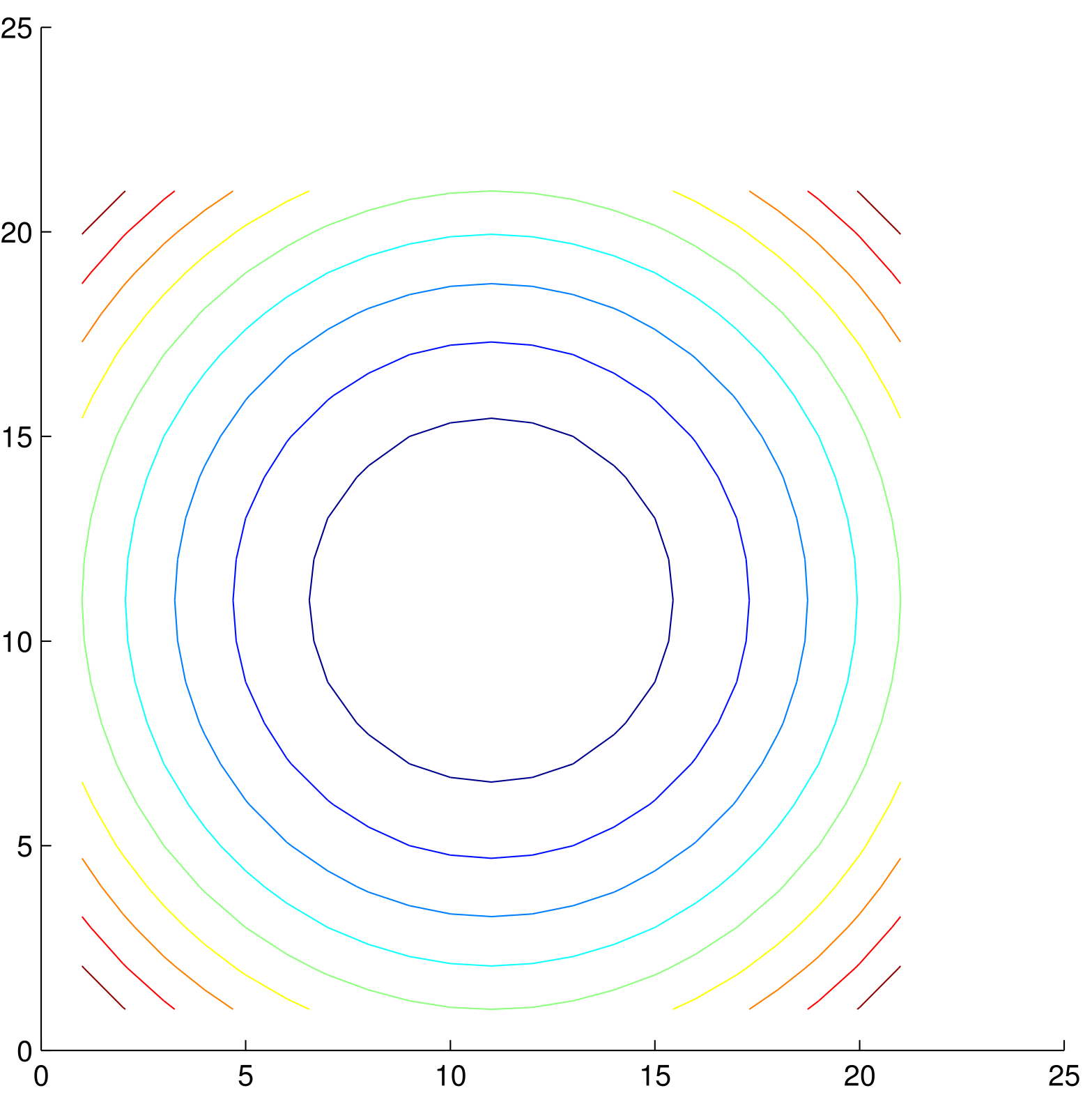
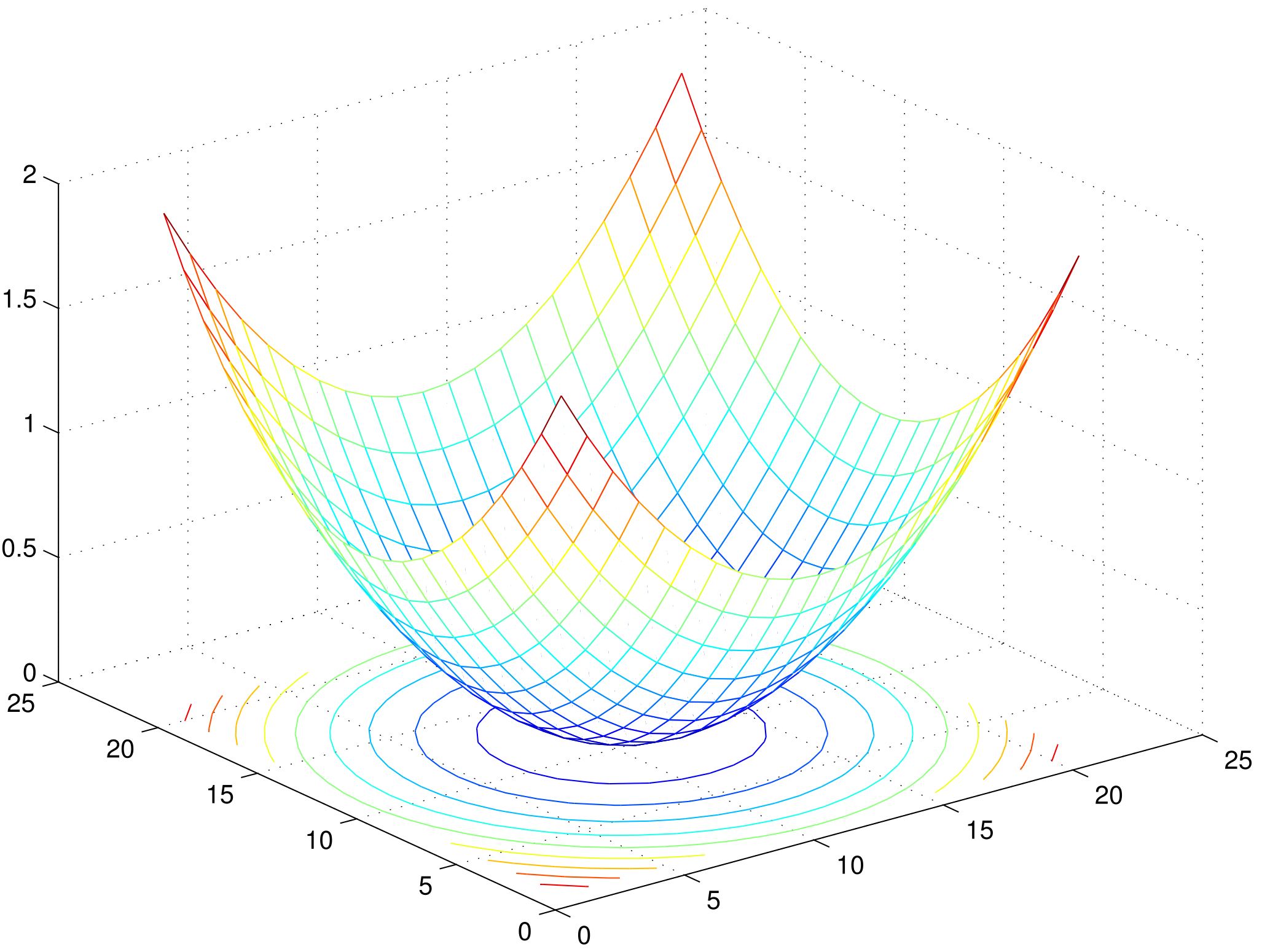
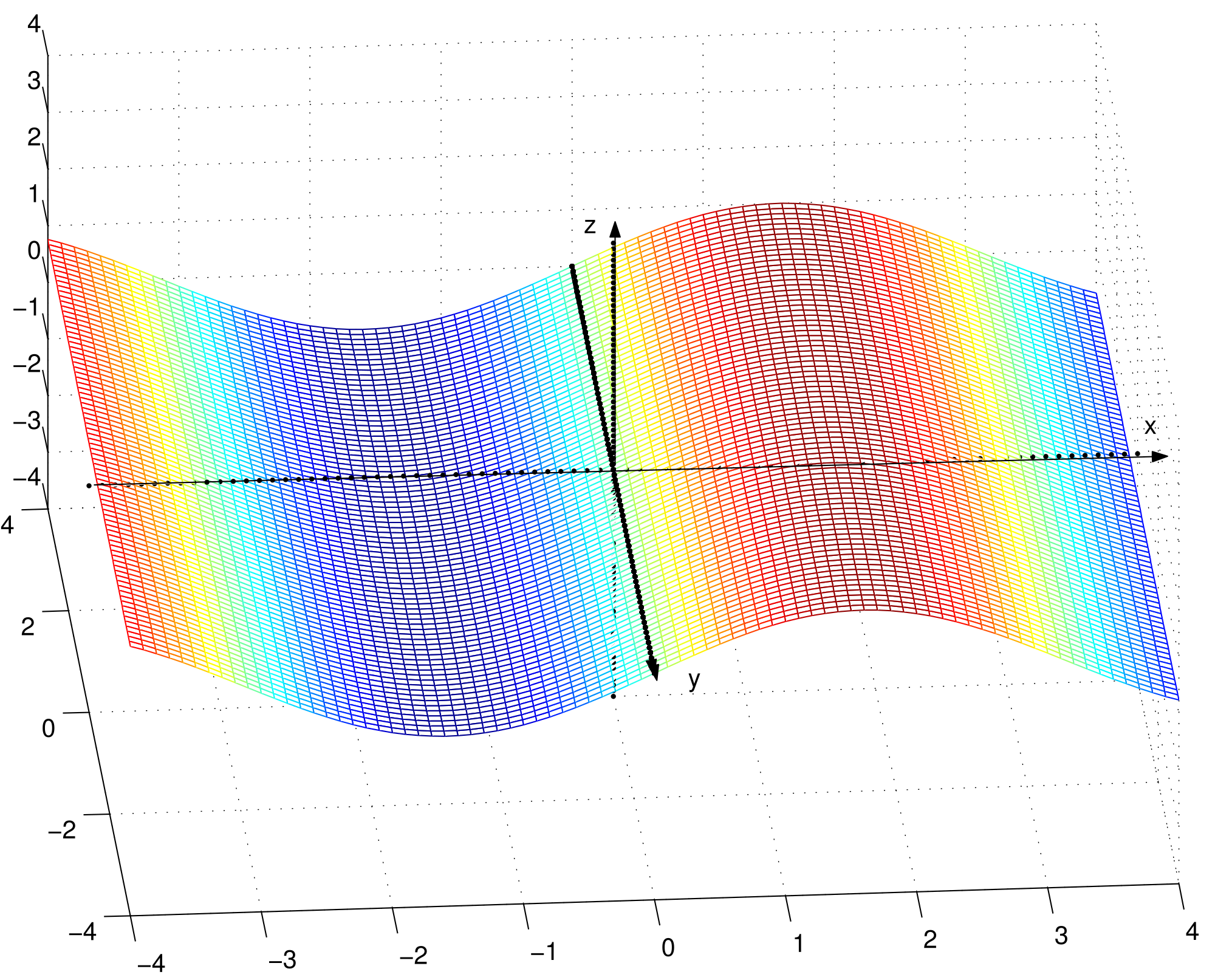
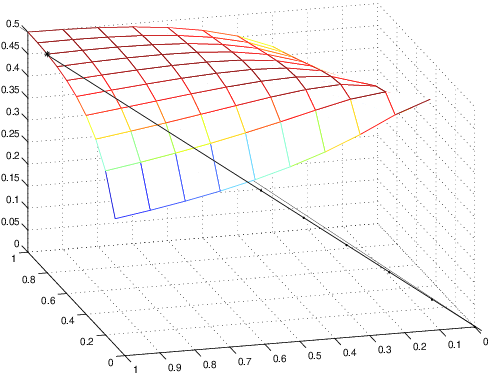
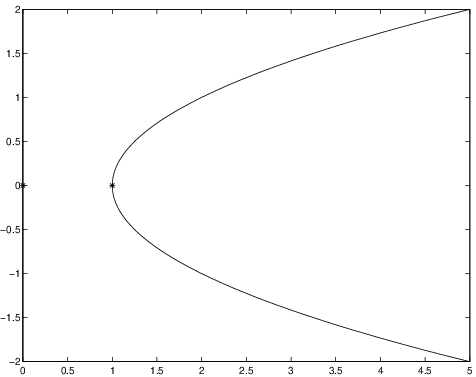
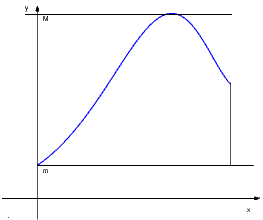
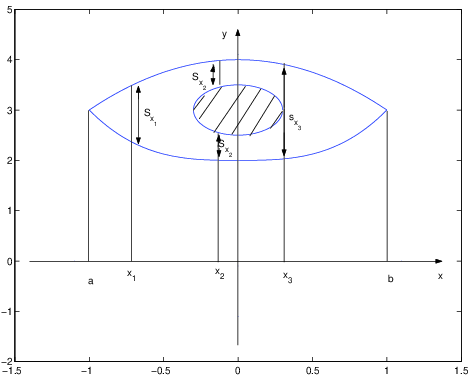
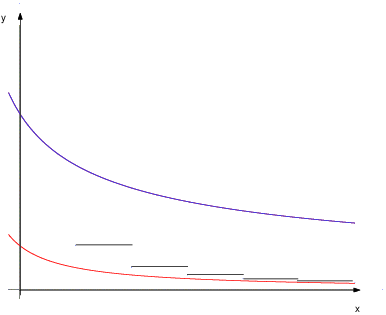
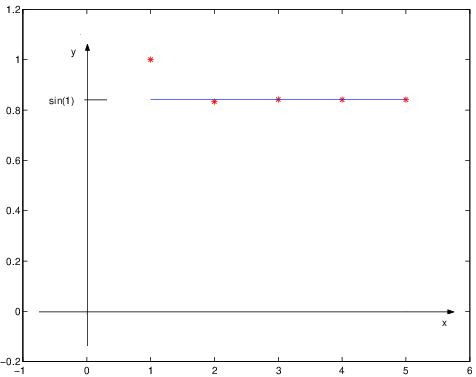
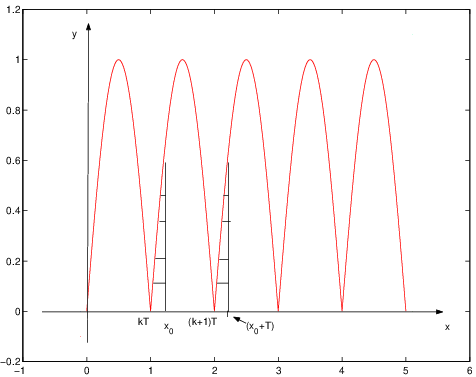
figura 1.1: Il test di MacLaurin
L. Pandolfi
Lezioni di Analisi Matematica 2
Il testo presenta tre blocchi principali di argomenti:
Lo studio dei blocchi A e B può scambiarsi di ordine senza problemi. Invece, è consigliabile studiare C per ultimo. Infatti, lo studio del Cap. 10 richiede il concetto di continuità e differenziabilità di funzioni di più variabili, studiato ai paragrafi 4.1–4.2. Ovunque nello studio del Cap. 10 è necessario conoscere il concetto di curva (ma non le proprietà differenziali delle curve, né gli integrali di curva). L’esponenziale di matrici richiede la definizione di serie, Cap. 1, e 2 e il paragrafo 10.4 richiede il Cap. 9.
Le serie numeriche vogliono generalizzare la somma di un numero finito di termini al caso in cui si sommano infiniti termini. Per questo si introduce il limite di una opportuna successione di “somme parziali”. Prima di tutto quindi ricapitoleremo i concetti fondamentali relativi alle successioni numeriche.
Una successione numerica è una funzione definita su ed a valori in (oppure in . Noi qui ci limitiamo a considerare successioni a valori reali). Una successione si indica col simbolo e si sottintende che . Talvolta, è un qualsiasi numero intero maggiore od uguale ad un certo che può anche essere negativo. Se è necessario specificare il primo dei valori dell’indice scriveremo . La successione si chiama:
Ricordiamo che una successione si dice fondamentale o di Cauchy quando
Vale:
Teorema 1 Ogni successione convergente è fondamentale; ogni successione fondamentale è limitata e quindi ogni successione convergente è limitata.
Naturalmente, esistono successioni limitate e non convergenti. Per esempio la successione di termine generale . Invece:
Teorema 2 Ogni successione fondamentale è convergente.
Dim. Accenniamo ai passi cruciali della dimostrazione, che si trova nei testi di Analisi Matematica 1. Sia la successione. Prima di tutto si prova che la successione ammette s.successioni convergenti. Questo si vede così: dato che una successione fondamentale è limitata, l’immagine di , ossia l’insieme è limitato. Se è finito, almeno uno dei suoi elementi è immagine di infiniti e quindi la successione ha una s.successione costante e quindi convergente, di ciamo ad . Se l’insieme è infinito, esso ammette almeno un punto di accumulazione , per il Teorema di Bolzano-Weierstrass. Si costruisce quindi una s.successione convergente ad . L’ultimo passo della dimostrazione consiste nel mostrare che è la successione stessa che converge ad , usando la definizione di successione fondamentale. _ Una successione è crescente quando implica ; decrescente quando implica . Un altro risultato importante da ricordare è il teorema delle funzioni monotone, la cui formulazione particolarizzata al caso delle successioni è la seguente:
Teorema 3 Sia una succesione monotona. Esiste ossia, ogni successione monotona è regolare.
Infine, ricordiamo che se una successione è regolare, anche la successione che si ottiene da essa trascurandone un numero finito di termini, ossia è regolare, ed ha il medesimo limite1.
Sia una successione di numeri. Per fissare le idee sia , ma in modo analogo si può trattare il caso in cui il primo indice sia per esempio o comunque sia diverso da . Si chiama serie dei numeri una nuova successione costruita come segue:
| (1.1) |
ossia, detto in modo più conciso:
I numeri si chiamano le somme parziali della serie2. La nuova successione si indica anche col simbolo
I numeri si chiamano i termini della serie e si dice che è il termine generale della serie. Nella definizione precedente niente si richiede al comportamento della successione o della successione . Se però la successione converge allora si dice che la serie converge; se la successione diverge (a oppure a ) allora si dice che la serie diverge (rispettivamente a oppure a ). Se la successione è priva di limite, si dice che la serie è oscillante o indeterminata. Una serie si dice regolare quando converge oppure diverge. Il carattere della serie o comportamento della serie è la proprietà di essere convergente, divergente o oscilante. Ricapitolando, se la successione converge ad oppure diverge, dovremmo indicare questo col simbolo
rispettivamente uguale a oppure oppure . Più brevemente si scrive
Si dice brevemente che è la somma della serie. Ovviamente, scambiando l’ordine di un numero finito di termini di una serie, non si cambia nè il comportamento della serie nè la sua somma, nel caso che la serie sia convergente (diremo più avanti cosa accade scambiando tra loro infiniti termini della serie). E’ anche vero che, sopprimento o aggiungendo un numero finito di termini, oppure cambiando il valore di un numero finito di termini, la serie rimane convergente, divergente o oscillante; ossia:
Teorema 4 Il carattere di una serie non muta alterandone un numero finito di termini.
Inoltre:
Dim. Si indichi con . L’ipotesi è che la successione converge e quindi anche la successione converge, ed al medesimo limite. Dunque,
Di conseguenza:
Esempio 6 La serie di “termine generale” , ossia la serie
non converge. _
Invece:
(con fissato) si chiama progressione geometrica (di ragione ). La serie
si chiama serie geometrica E’ noto che, se ,
e quindi
Si noti che la serie geometrica per definizione inizia con l’indice . Se per qualche ragione si deve iniziare con un primo indice diverso, di ciò va tenuto conto nel calcolo della somma. Per esempio
Sia una successione e sia
(ovviamente definita per ). Consideriamo la serie
| (1.2) |
Una serie ottenuta con questo procedimento si chiama serie telescopica E’ facile calcolare le somme parziali di una serie telescopica:
e, in generale,
Dunque:
Teorema 8 La serie telescopica costruita sopra converge se e solo se
e in tal caso
diverge se oppure se . La serie è oscillante se e solo se la successione è priva di limite.
Vediamo alcuni esempi.
Esempio 9 Consideriamo la serie
Questa serie diverge. Infatti,
Sia ha quindi una serie telescopica e
Esempio 10 Consideriamo la serie
Si vede che questa è una serie telescopica notando che
e inoltre . Dunque,
Se per qualche ragione si devono sommare i termini con , allora
Consideriamo ora la serie
Decomponendo in fratti semplici,
Si tratta quindi di una serie telescopica, la cui somma è . _
Infine:
Esempio 11 Anche la serie seguente è una serie telescopica:
Infatti,
e quindi la serie è uguale a
Dunque, la serie converge e la sua somma è . _
Nonostante gli esempi importanti della serie geometrica e delle serie telescopiche, calcolare esplicitamente le somme parziali di una serie è pressoché impossibile. L’unica cosa che si può fare è dare condizioni per la convergenza o divergenza di serie, e quindi, se già si sa che la serie converge, approssimarne numericamente la somma.
Come si è detto, è ben diffcile calcolare esplicitamente le somme parziali di una serie. Per questo è necessario conoscere dei criteri che assicurino la convergenza o meno di una serie, senza calcolarne le somme parziali. Dato che la somma di una serie è il limite della successione delle somme parziali, dovremo basarci su criteri per l’esistenza del limite, che non facciano intervenire la preliminare conoscenza del limite stesso. Essenzialmente, questi criteri si riducono a due soli: il teorema di Cauchy per le successioni e il teorema delle funzioni monotone. Esaminiamone le conseguenze per il caso delle serie.
Vediamo come si trascrive il Teorema di Cauchy nel caso in cui è la successione delle somme parziali della serie
| (1.3) |
Sia, per fissare le idee, . Allora,
Possiamo quindi enunciare il Teorema di Cauchy come segue:
Teorema 12 La serie (1.3) converge se e solo se per ogni esiste tale che per ogni coppia di indici , con
vale
D’altra parte, notiamo che
e quindi:
Corollario 13 Se la serie
converge, anche la serie
converge.
Dim. Infatti, se converge, per ogni esiste tale che per si ha
E quindi anche la serie converge, grazie al Teorema 12. _ Più avanti vedremo una diversa dimostrazione di questo corollario. Si dice che la serie converge assolutamente quando è convergente la serie . Il corollario precedente quindi può enunciarsi in questo modo:
Questo risultato è molto importante perché la serie è una serie a termini positivi. Criteri di convergenza facilmente usabili esistono appunto per il caso delle serie a termini positivi, come ora andiamo a vedere.
Usando il teorema delle funzioni monotone, è facile vedere che
Teorema 15 Sia una successione a termini positivi. La serie degli converge se e solo se esiste tale che per ogni .
Dim. Ricordiamo il significato di : prima si costruisce la successione
e poi si studia il limite . La successione è crescente perché, essendo per ogni ,
Dunque la successione ammette limite, finito o meno, per il teorema delle funzioni monotone. Il limite è finito se e solo se la successione è superiormente limitata, ossia se e solo se esiste tale che per ogni . _ Il teorema facilmente si estende al caso di successioni a termini negativi oppure definitivamente positive o negative. Inoltre:
Teorema 16 (Teorema del confronto) siano e due serie a termini positivi, con per ogni . Allora, se converge, anche converge; se diverge lo stesso fa .
Questo semplice risultato ha come conseguenza due importanti criteri di convergenza per le serie a termini positivi:
Teorema 17 (Criterio della radice) Sia per ogni :
allora la serie converge.
allora la serie diverge.
Dim. Da segue infatti e, se , la convergenza della serie segue dall’esempio 7 e dal Teorema del confronto. Se per un vale
allora3
Di conseguenza il termine generale della serie non tende a zero, e quindi la serie non converge. _ Si ha inoltre:
Teorema 18 (Criterio del rapporto) Se vale definitivamente
| (1.4) |
allora converge; se allora diverge.
Dim. Proviamo l’asserto nel caso in cui la (1.4) valga per ogni . Se allora , e, in generale, . Si sa che se allora converge, si veda l’esempio 7. L’asserto segue quindi dal Teorema del confronto. In modo analogo si vede il secondo asserto. _ Ricordando i teoremi sui limiti, si può enunciare il corollario seguente:
Corollario 19 Sia una serie a termini positivi. Vale:
Concludiamo con un esempio:
Esempio 20 Consideriamo la serie
| (1.5) |
Mostriamo che questa serie è divergente. Si noti che per ogni vale
Infatti, la funzione è concava e quindi ha grafico che sta sotto a ciascuna delle sue tangenti; e è la tangente nell’origine. In particolare vale
Abbiamo visto che la serie a termini positivi
diverge, si veda l’esempio 9. Dunque, per confronto, anche la serie (1.5) diverge4. _ La serie (1.5) si chiama serie armonica. Si osservi che il carattere della serie armonica non può determinarsi usando il criterio del rapporto oppure quello della radice. Infatti, nel caso della serie armonica,
All’esempio 24 vedremo una serie di termine generale che è convergente e tale che anche per essa vale
Combinando questi due esempi si ha:
Le serie a termini positivi hanno una notevole proprietà, che non è condivisa dalle generiche serie a termini di segno variabile: se si altera l’ordine di infiniti termini di una serie si trova una nuova serie, che generalmente ha un comportamento diverso da quello della serie di partenza. Invece:
Teorema 21 Due serie a termini positivi, con gli stessi elementi in ordine diverso, hanno la medesima somma.
Per ragioni che vedremo, molto spesso il termine generale di una serie contiene dei fattoriali. I fattoriali hanno un “buon comportameno” rispetto al rapporto, nel senso che permettono facilmente di fare semplificazioni. Invece, il criterio della radice sembra diffcile da usare in presenza dei fattoriali. In realtà non è così grazie alla formula di Stirling
| (1.6) |
La dimostrazione si trova nei testi di Analisi Matematica 1.
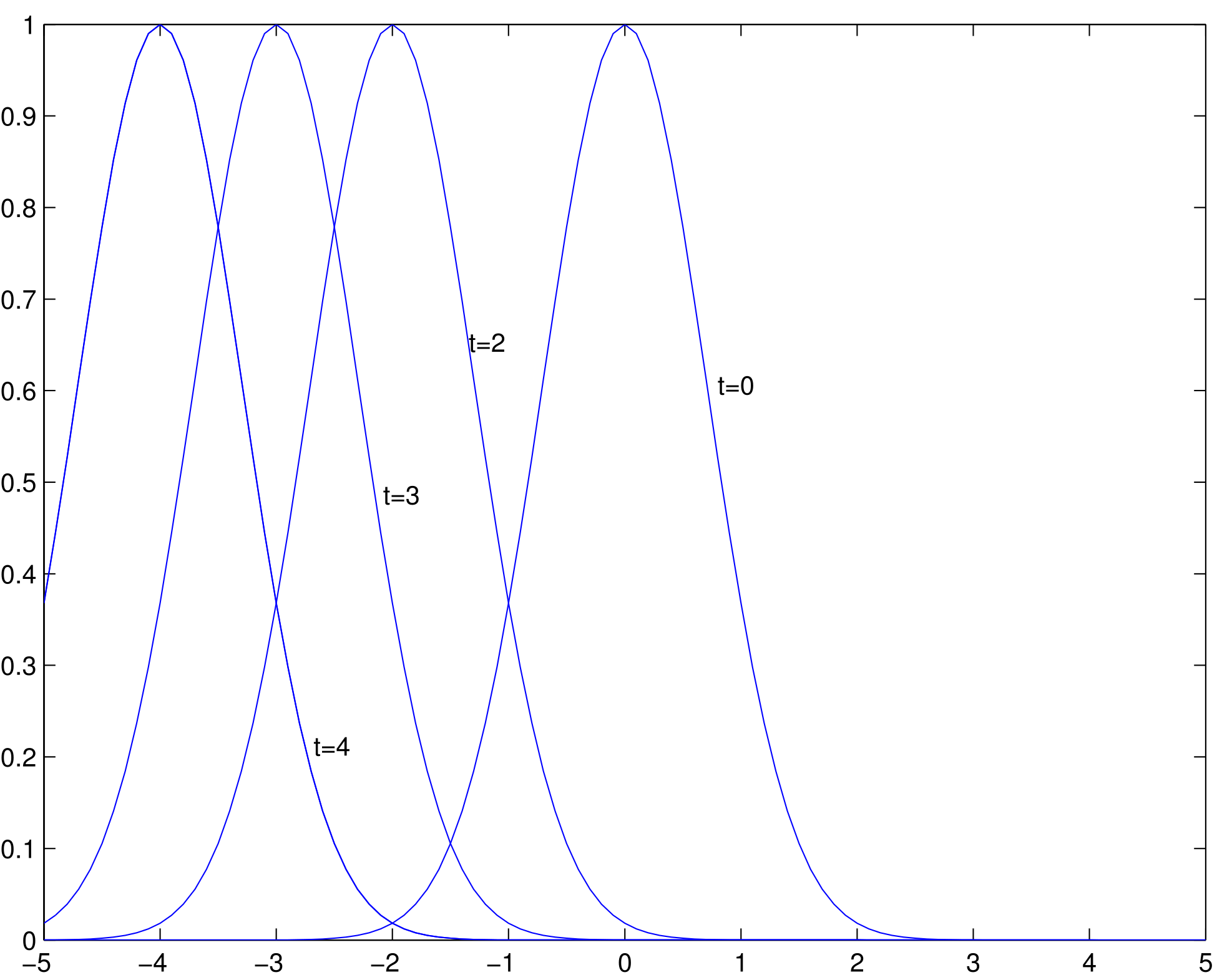
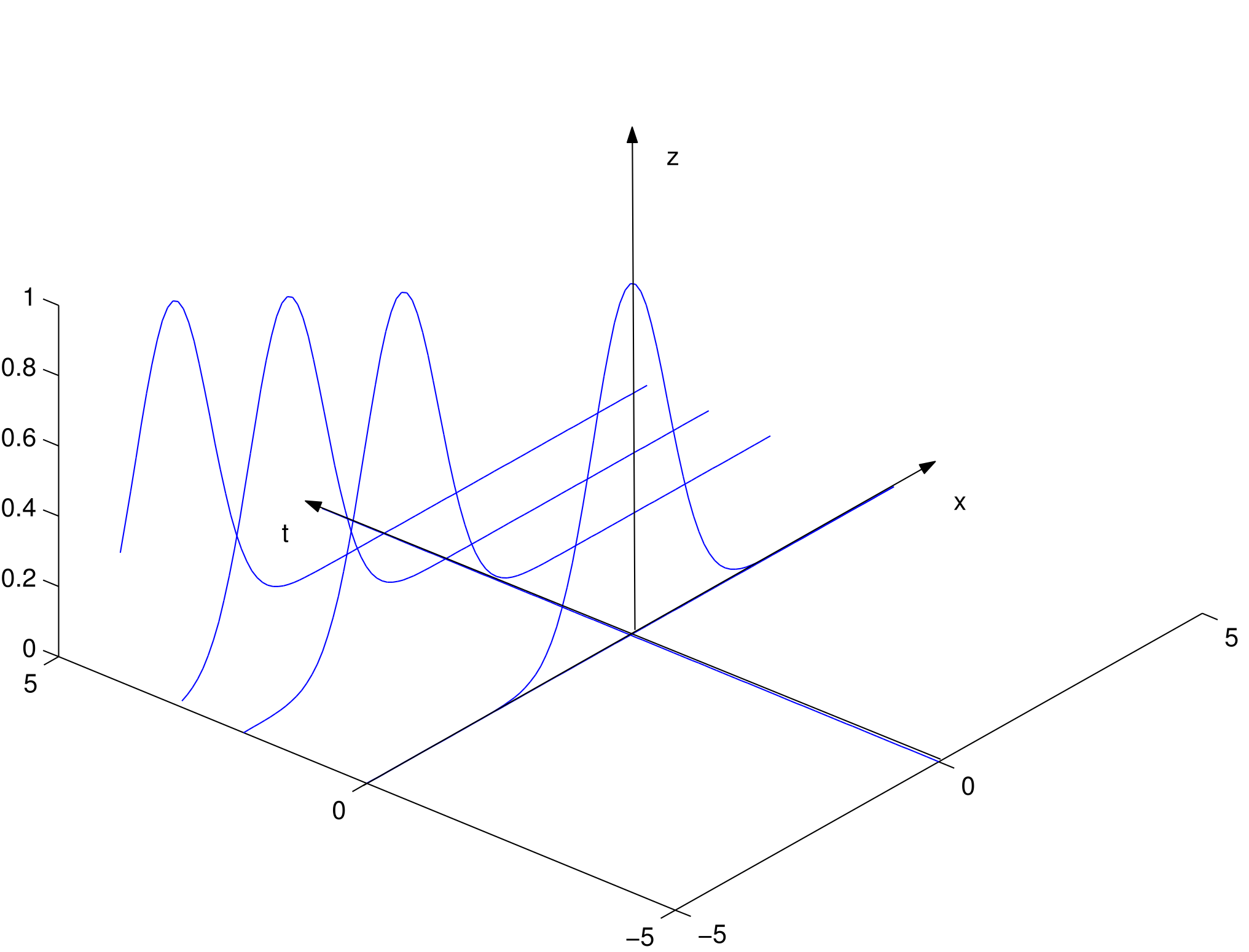
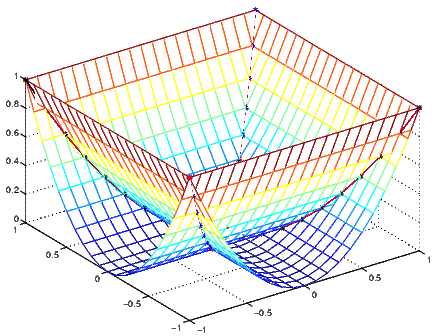
Consideriamo le somme parziali di una serie a termini positivi
Esse sono
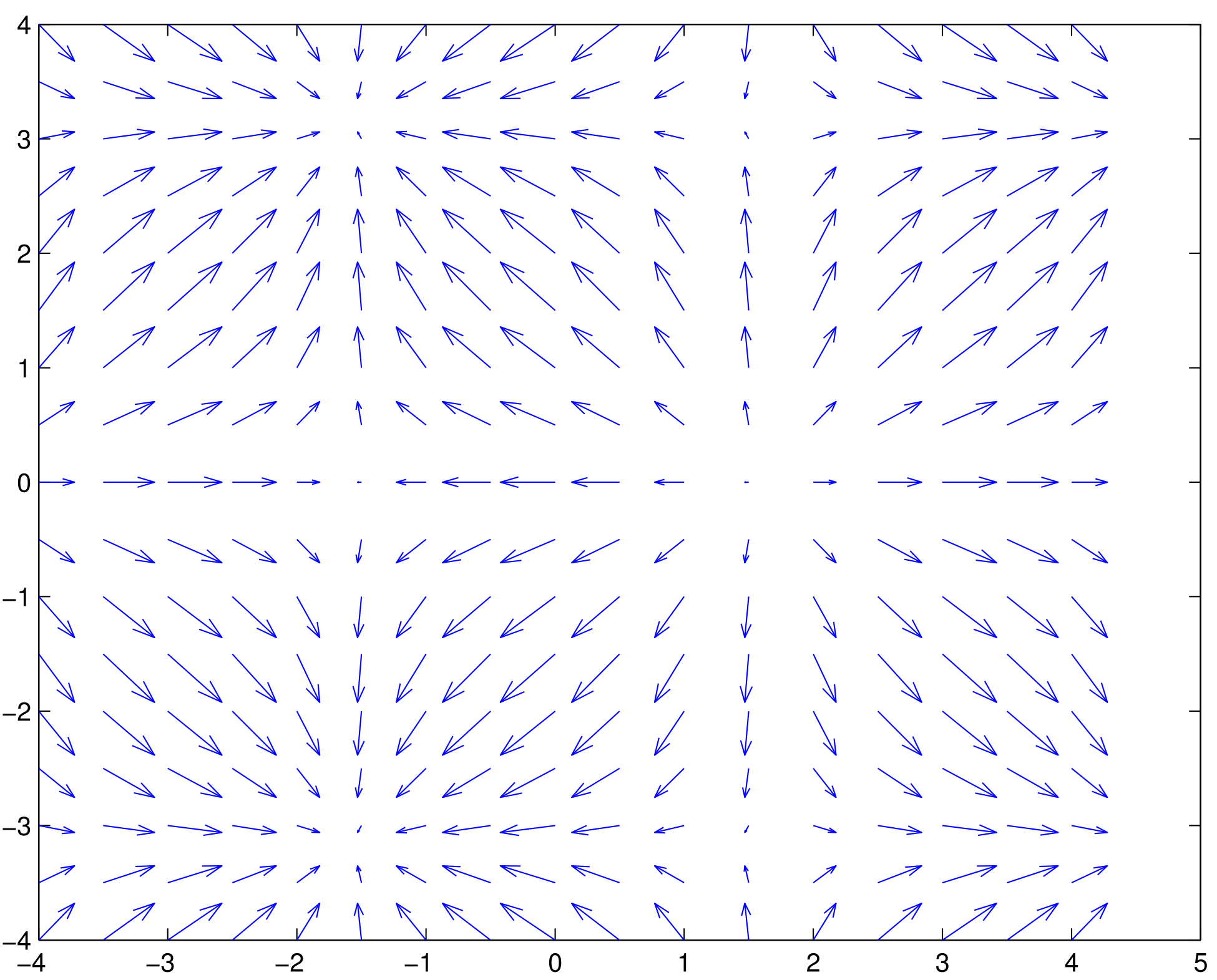
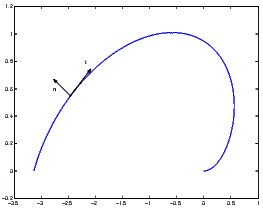
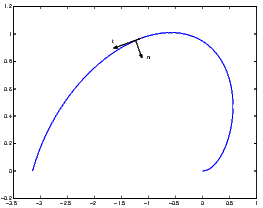
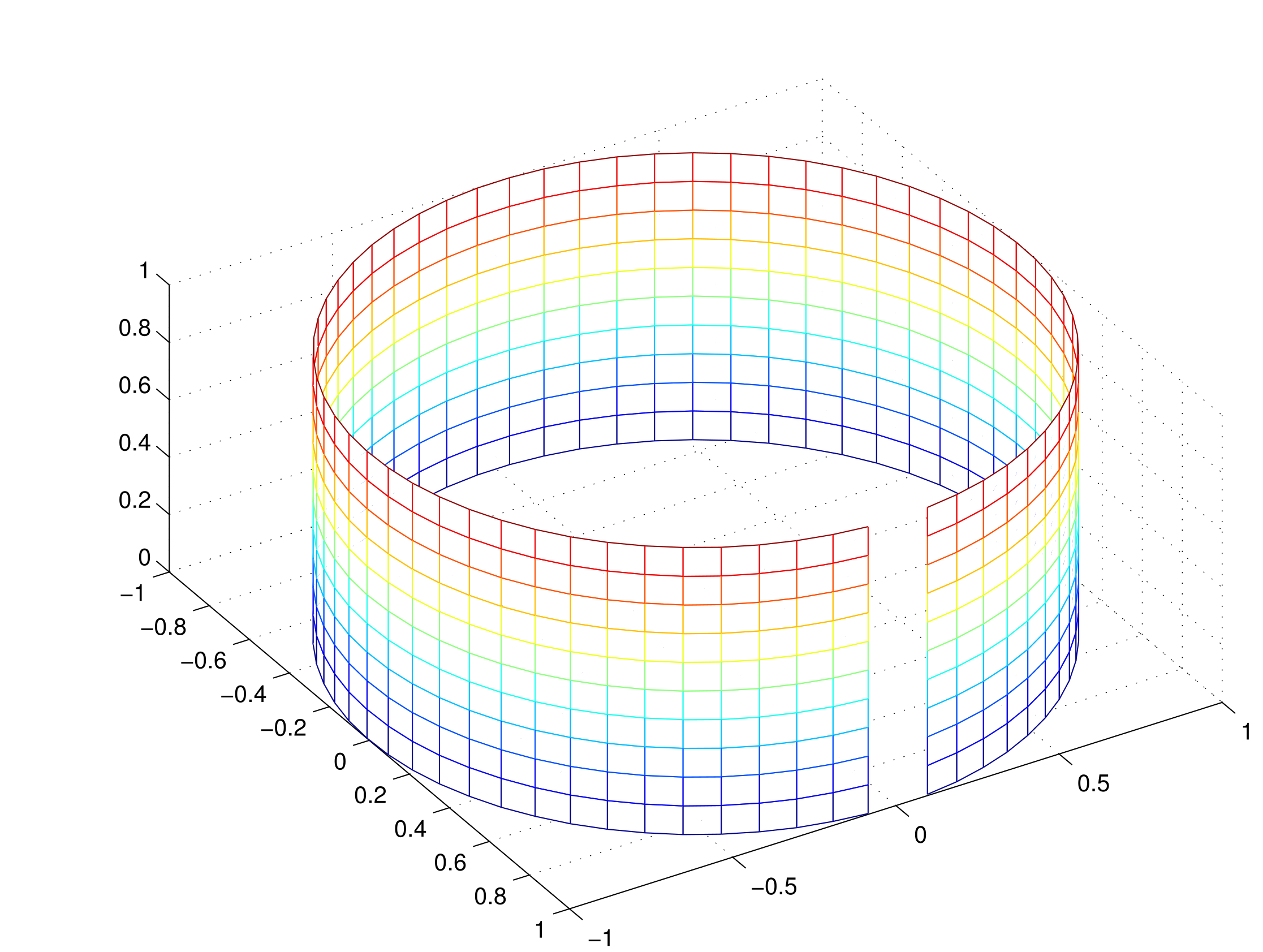
Queste espressioni si possono interpretare come somma di aree di rettangoli interpretando come misura della base ed come misura dell’altezza.
ove è la funzione costante a tratti
Dunque, la somma della serie è l’integrale improprio di :
Pensiamo ora ai rettangoli messi come in figura 1.1, a sinistra, e supponiamo di poter trovare due funzioni, e , che prendono valori maggiori o uguali a zero e tali che inoltre valga
Si veda la figura 1.1, a destra. In tal caso si ha
La serie è a termini positivi e quindi regolare; le funzioni sono non negative e quindi ammettono integrale improprio finito o meno. Dunque, dal teorema di confronto per i limiti, si ha
Ricapitolando,
Il caso tipico in cui quest’argomento si applica facilmente è il caso in cui esiste una funzione definita su , decrescente e inoltre
In questo caso,
| (1.7) |
Definiamo, per ,
e notiamo che la (1.7) si scrive
Inoltre,
Ossia, nel caso descritto, i due integrali impropri hanno il medesimo comportamento e questo comportamento è ereditato dalla serie. Possiamo quindi enunciare:
Teorema 22 (Test di MacLaurin) Sia una funzione non negativa e decrescente definita su . Si consideri la serie
Le sue somme parziali verificano
| (1.8) |
In particolare, la serie a termini positivi
converge se e solo se
L’interesse di questo teorema sta nel fatto che talvolta l’integrale di può esplicitamente calcolarsi mediante il calcolo delle primitive; e comunque esistono test effcienti per lo studio della convergenza o divergenza degli integrali impropri.
Esempio 23 Si sa già che la serie armonica
diverge. La serie
converge, come si vede dal criterio di MacLaurin. Infatti, la funzione
ha integrale improprio convergente:
Procedendo in modo analogo5 si provi invece che
Possiamo combinare l’esempio 24 col criterio di confronto, ottenendo:
Corollario 25 Consideriamo la serie . Vale:
allora la serie converge.
allora la serie diverge.
In particolare, possiamo enunciare:
Per ora, stiamo lavorando con serie a termini positivi, ma non abbiamo scritto esplicitamente questa condizione perché vedremo, al Corollario 27, che il test precedente vale per ogni serie.
Sulle serie a termini di segno qualsiasi, limitiamoci ad osservare due proprietà. Si è già detto che se la serie converge, si dice che la serie converge assolutamente. Ricordiamo, dal teorema 15:
Ricordiamo ora che quando è un infinitesimo, e ciò accade se e solo se è un infinitesimo. Quindi:
Infine, si dice che una serie è a segni alterni se ha forma
| (1.10) |
ossia se gli addendi si susseguono cambiando segno ad ogni passo. Esiste, per le serie a segni alterni, una notevole condizione suffciente di convergenza, e anche una stima per la somma della serie:
Teorema 28 (Criterio di Leibniz) Se valgono ambedue le condizioni
allora la serie a segni alterni (1.10) converge; inoltre, detta la somma della serie, per ogni vale:
ha segno opposto ad ; ossia, l’approssimazione è per eccesso se l’ultimo termine sommato è positivo; per difetto se è negativo.
La dimostrazione della convergenza è nell’Appendice 1.8.2.
Esempio 29 Consideriamo la serie
Questa serie si chiama serie di Mengoli Il criterio di Leibniz mostra che questa serie converge. La somma della serie è nota:
Il Teorema 28 dà anche una stima dell’errore che si commette sommando termini: l’errore è minore di . _
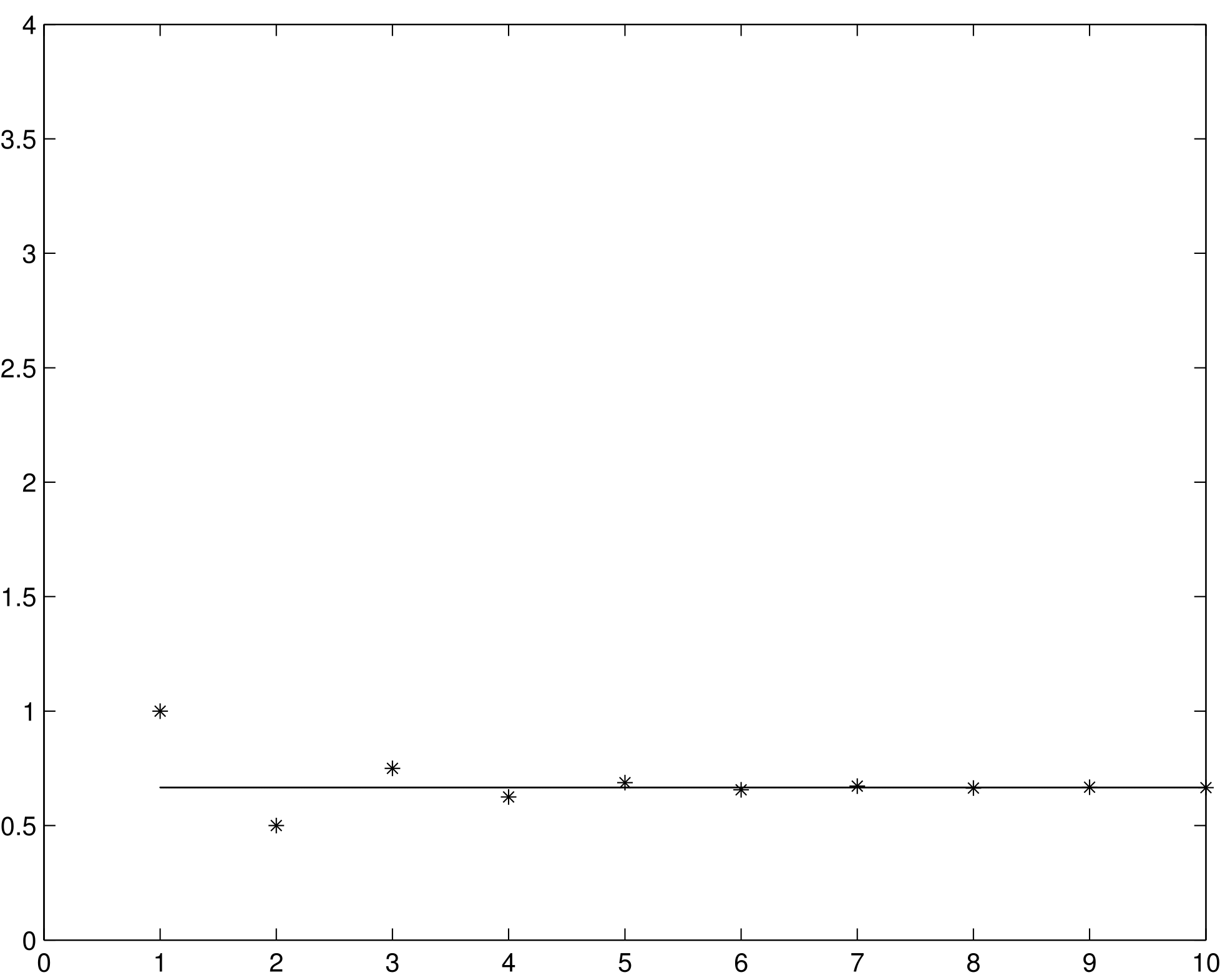
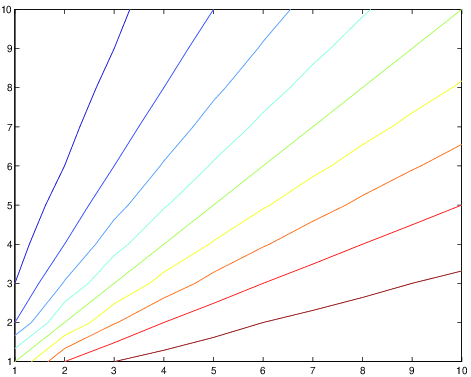
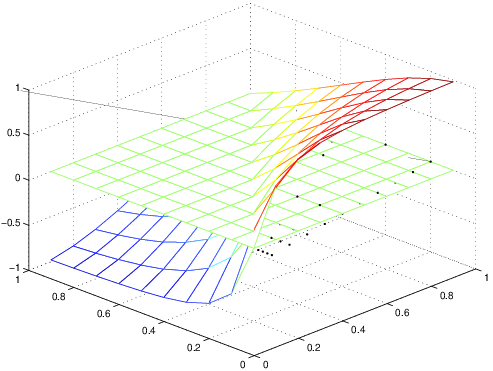
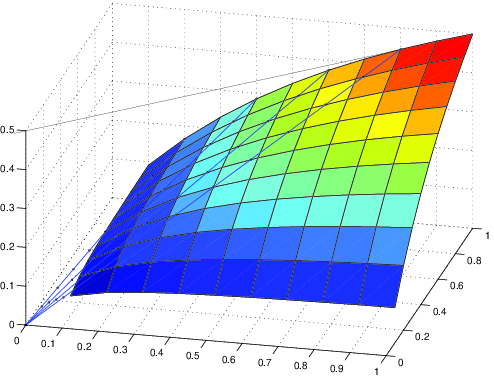
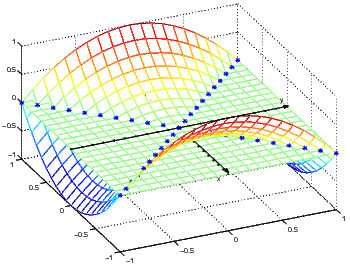
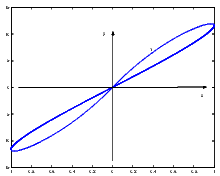
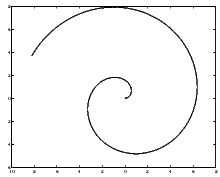
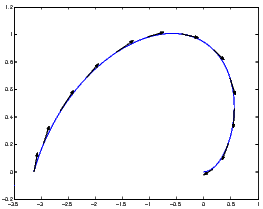
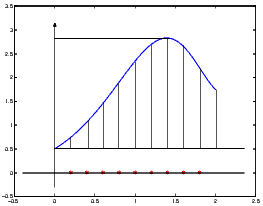
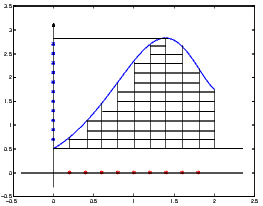
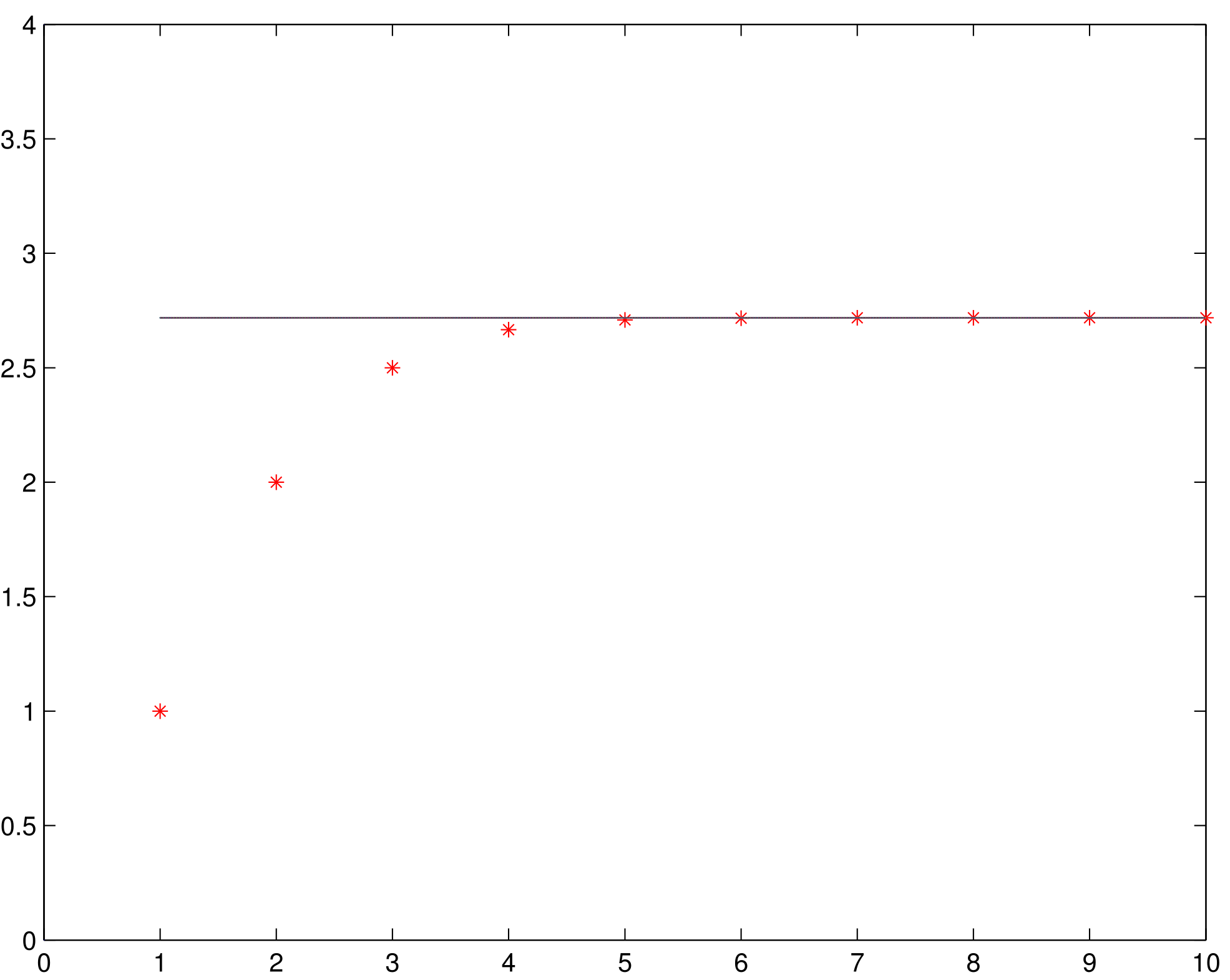
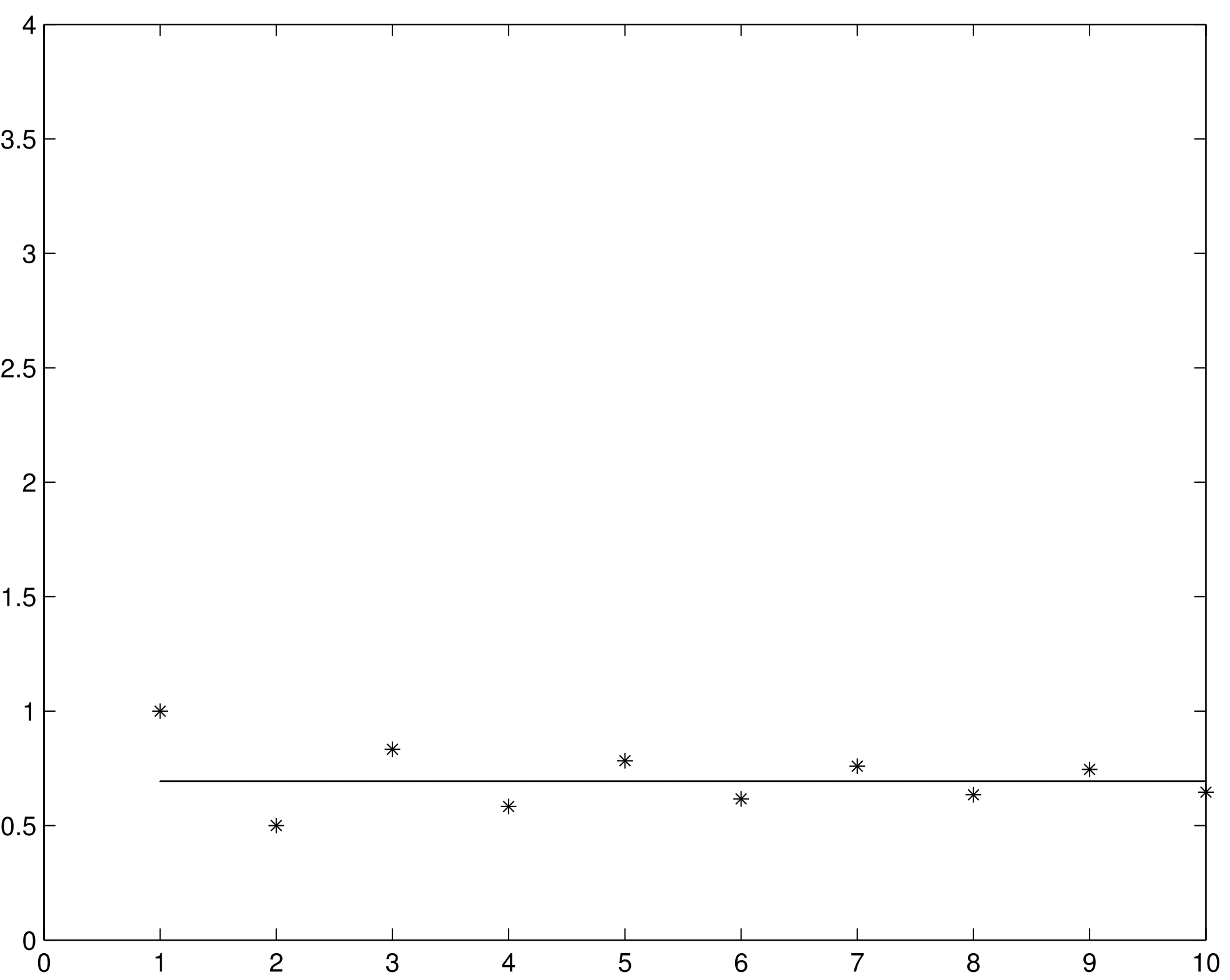
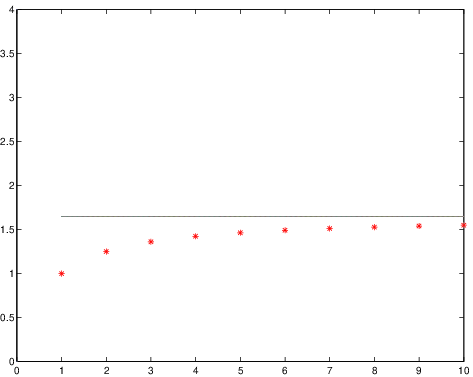
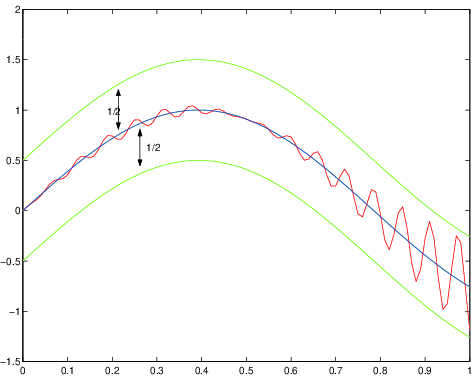
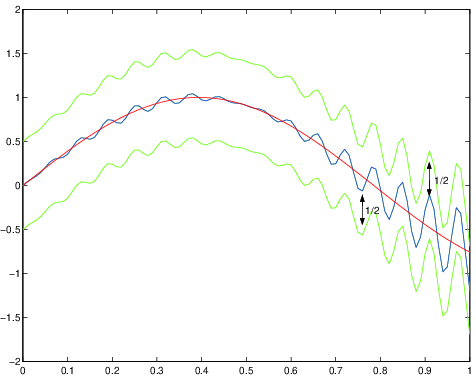
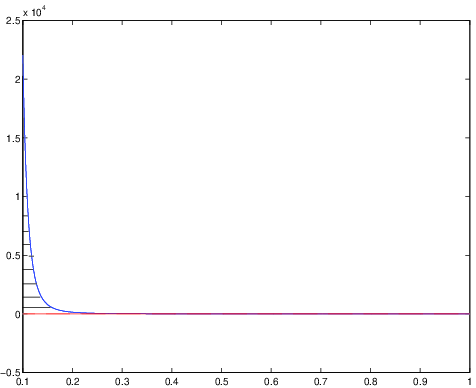
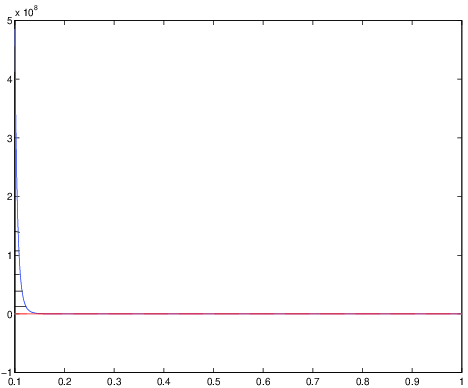
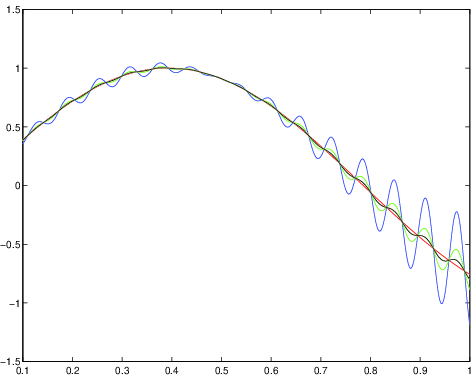
Le figure 1.2, 1.3 e 1.4 mostrano alcuni esempi numerici di somme parziali di serie convergenti. Le serie sono specificate nelle intestazioni delle figure.
Graficamente, i diagrammi che descrivono le due serie aventi come termine n-esimo 1/n! e ( − 1)n/n e come somma e e log2, rispettivamente, sono del tutto analoghi a quelli nella figura 1.2
Graficamente, i diagrammi che descrivono le due serie aventi come termine n-esimo 1/n2 e ( − 1)/(2n + 1)! e come somma π/6 e log1, rispettivamente, sono del tutto analoghi a quelli nella figura 1.2
Il concetto di serie generalizza quello di somma finita. In una somma finita il risultato non dipende dall’ordine degli addendi (proprietà commutativa dell’addizione). Nel caso delle serie, l’asserto analogo vale se si scambiano tra di loro un numero finito di termini. E’ FALSO se si scambia il posto di infiniti termini. Mostriamo un esempio:
Esempio 30 Consideriamo la serie di Mengoli . Si sa che questa serie converge. Mostriamo che è possibile scambiare il posto di infiniti termini, in modo da ottenere una serie divergente a . Ricordiamo per questo che
diverge e quindi anche
diverge. Conviene vedere una dimostrazione di questo fatto, diversa da quella già vista: consideriamo
(si è usato il fatto che si sommano termini, ciascuno dei quali è maggiore di ). Ciò contrasta col criterio di convergenza di Cauchy, e mostra che la serie diverge. Dato che il carattere di una serie non dipende dai primi elementi, anche ciascuna delle serie
| (1.11) |
è divergente. Ora consideriamo la serie di Mengoli, per semplicità cambiata di segno. Essa converge a . Vogliamo riordinarne gli elementi in modo da trovare una serie divergente a . Per questo sommiamo prima i termini di indice pari, fino ad un certo indice tale che
Questa è la somma parziale della serie riordinata. Sottraiamo quindi il primo termine di indice dispari, ossia ottenendo una somma parziale tale che
Consideriamo ora la serie (1.11) con . Come si è detto, questa serie diverge. Dunque, possiamo sommare ulteriori termini di indice pari alla somma parziale già ottenuta, fino a trovare una somma parziale maggiore di ; sottraiamo quindi il primo dei termini di ordine dispari non ancora usati (che è , minore di ). Si trova una nuova somma parziale, diciamo , maggiore di :
Continuiamo a sommare termini di indice pari (e quindi positivi) fino ad avere una somma parziale maggiore di e quindi sottraiamo il primo termine di indice dispari non usato (che è certamente minore di , infatti è ). Si trova una somma parziale tale che
Procedendo in questo modo si trova un riordinamento che conduce ad una serie divergente a . _
Si potrebbe mostrare che per ogni scelta di è possibile riordinare la serie di Mengoli in modo tale da trovare una serie convergente ad , inclusi ed , o anche in modo da trovare una serie oscillante. Diciamo che una serie converge incondizionatamente quando una serie converge ad e inoltre quando qualunque serie ottenuta riordinandone gli elementi converge al medesimo numero . La convergenza incondizionata si caratterizza come segue:
Teorema 31 (Teorema di Dirichlet) Una serie converge incondizionatamente se e solo se converge assolutamente. Se ciò non accade è possibile riordinare gli elementi della serie in modo da cambiare il carattere della serie, e anche in modo da ottenere una serie convergente ad un qualsiasi numero assegnato, o divergente a oppure a .
In particolare:
Corollario 32 Ogni serie a termini di segno costante converge incondizionatamente.
Torniamo a considerare la serie geometrica,
Questa serie dipende dal parametro e, come si è visto, converge se , diverge se ed oscilla se . Facendo variare il parametro , ciascuno degli addendi viene ad essere una funzione di ,
Dunque, la serie geometrica può intendersi come serie di funzioni. In generale, data la successione i cui elementi sono funzioni (tutte con lo stesso dominio) si chiama serie di funzioni la serie
La somma della serie si calcola punto per punto; ossia, per ogni fissato valore di si calcola la somma della serie di numeri . Il dominio comune alle funzioni è , ma abbiamo notato che la serie geometrica converge (ad ) soltanto per . Dunque, in generale, il dominio su cui è definita la somma di una serie di funzioni è più piccolo del dominio comune delle funzioni. Le serie di funzioni si studieranno al Capitolo 2. Va tenuta presente la loro definizione per capire alcune sottigliezze del paragrafo 1.6.
Il concetto di “serie” estende quello di “somma finita”. Le somme finite godono di utili proprietà, come per esempio la proprietà distributiva del prodotto sulla somma, la proprietà associativa e “dissociativa”. Ci possiamo chiedere se le analoghe proprietà valgono per le serie. Per questo dobbiamo tener conto di due problemi:
Si sa già che la somma della serie varia cambiando l’ordine dei suoi termini. Quindi dovremo aspettarci che una proprietà analoga non valga necessariamente per le serie.
Queste osservazioni suggeriscono di elencare prima le relazioni tra limiti ed operazioni sia nella versione “giusta” che nella versione “sbagliata”:
Ricordiamo brevemente perché le affermazioni a destra sono sbagliate: per esempio nel caso 1, il limite della somma di due funzioni può esistere, senza che le due funzioni individualmente abbiano limite, come è il caso del limite, per , quando le due funzioni sono
In questo caso,
Questo limite non è uguale a
per la semplice ragione che i due limiti non esistono. Il caso 2, del prodotto è analogo. Vale la pena però di vedre un caso banale che però può inndurre in errore nel caso delle serie: NON è vero che la formula seguente vale per OGNI numero reale :
Questa formula vale solo se oppure se esiste finito, come mostrano gli esempi delle funzioni
In ambedue i casi, se ,
mentre le espressioni
non hanno senso. Vediamo ora il caso 3a. Chiaramente, da non si può dedurre la convergenza a zero di : si consideri il caso ed . Il caso 3b: si consideri l’esempio della successione con , convergente ad , mentre . La successione è oscillante. Richiamato ció, definiamo:
Prodotto di una serie per un numero
In queste definizioni, l’ordine degli addendi è quello indicato. Supponiamo
Allora:
purché uno almeno dei due limiti sia un numero oppure sia che siano ambedue oppure .
La definizione di prodotto di serie è più complessa e si vedrà nel paragrafo 1.7. Si potrebbe anche provare:
Teorema 33 Sia e sia per ogni . Sia una successione limitata. Allora, la serie converge.
Gli esempi seguenti mostrano i problemi che si possono incontrare usando le operazioni sulle serie senza le dovute cautele:
Esempio 34 Consideriamo la serie seguente:
Ovviamente la somma della serie è . Scrivendo
si potrebbe essere tentati di usare una specie di “regola dello scomponendo” e scrivere
Ovviamente questo non ha senso, perché le due serie a destra non convergono; e quindi non definiscono numeri che si possano sommare. Un esempio analogo, un po’ più riposto, è quello delle serie
Le due serie non convergono mentre la serie
converge. _
La regula del prodotto sembra “più innocua” nel senso che sembra più diffcile sbagliare. In realtà anche questa regola è fonte di errori, come mostra l’esempio seguente:
Esempio 35 Sia un parametro reale. Studiare la convergenza della serie
| (1.12) |
Si lascia per esercizio di provare che la serie converge per ogni . Si noti che essa certamente converge per perché in tal caso tutti i termini della serie sono nulli. Però, sembra del tutto naturale mettere in evidenza portandolo fuori dal segno di serie, scrivendo
e magari studiando la convergenza della serie “piú semplice”
Si dimentica in questo modo che il parametro può essere nullo. Se questa serie converge e il procedimento seguito, di mettere in evidenza , è corretto. Se però , l’ultima serie scritta non converge, mentre la (1.12) ovviamente converge. L’errore è consistito nel “mettere in evidenza” il fattore dai termini della serie, errore favorito dal fatto che il fattore è stato indicato col generico simbolo . _
Ci sono anche altri errori nei quali si può cadere trattando le operazioni sulle serie senza la dovuta attenzione:
Esempio 36 Un modo veloce di “calcolare” la somma della serie geometrica
è il seguente:
Dunque,
Questo risultato, apparentemente giusto, è in realtà sbagliato. Infatti da nessuna parte si è usata la condizione e quindi sembrerebbe da questo calcolo che la serie geometrica converga per ogni valore di , cosa notoriamente falsa. Si lascia per esercizio di trovare l’errore in questo ragionamento. _
Infine, vediamo una diversa dimostrazione del Teorema 26 basata sulle proprietà illustrate in questo paragrafo: La serie è una serie a termini positivi. Se essa converge, dal teorema 15 convergono anche le due serie e , con
Quindi, per il teorema 16, converge anche che è .
Il prodotto di serie può definirsi in vari modi. Quello più utile è il prodotto alla Cauchy L’espressione del prodotto alla Cauchy può sembrare macchinosa, ma se ne capisce la ragione se si considera l’esempio di un prodotto di polinomi. Consideriamo il caso del prodotto di due polinomi di grado . Il prodotto
è la somma di tutti i possibili addendi con , . Raccogliendo i coeffcienti degli addendi del medesimo grado il prodotto si scrive come
Posto , il prodotto
si trova scritto come segue:
Ciò suggerisce le due definizioni seguenti:
| (1.13) |
la serie
Osservazione 37 Se l’indice di una, o ambedue, le serie non parte da zero, la formula del prodotto alla Cauchy si intende scritta aggiungendo un numero finito di termini tutti nulli, in modo da far partire gli indici da . _
La convergenza di ambedue le serie (1.13) non implica la convergenza del loro prodotto alla Cauchy. Vale invece:
Teorema 38 Le due serie (1.13) convergano, ed abbiano somma rispettivamente e . Allora:
Concludiamo con un esempio che mostra due serie convergenti (non assolutamente), il cui prodotto alla Cauchy non converge.
Esempio 39 Consideriamo la serie (convergente per il criterio di Leibniz)
e calcoliamone il prodotto alla Cauchy con se stessa. Notiamo che l’indice di questa serie parte da invece che da zero e quindi la formula del prodotto alla Cauchy va lievemente modificata come detto nell’sservazione 37:
Si vede facilmente che la funzione
è crescente per e decrescente per e quindi ha minimo per e per . Il minimo vale . Dunque
il termine generale del prodotto alla Cauchy non converge a zero e quindi la serie ottenuta come prodotto alla Cauchy non converge. _
Il test di MacLaurin può ulteriormente precisarsi notando che la (1.8), ossia
si può anche scrivere come
e che, al crescere di , la successione
decresce. e quindi ammette limite compreso tra ed . Infatti, si ha:
Ossia, al crescere di , i valori delle somme parziali e dell’integrale “si avvicinano” anche se l’integrale improprio (e quindi anche la serie) diverge. Quest’osservazione può usarsi per ottenere “stime asintotiche” delle somme parziali della serie per grandi valori di . Mostriamo questo considerando l’esempio della serie armonica. Sia
La serie armonica è
e quindi diverge, dal criterio di MacLaurin. E’ questo un modo di vedere che la serie armonica diverge, diverso da quello visto all’esempio 1.5. Però, il criterio di MacLaurin dà un’informazione in più:
ossia
E inoltre,
esiste, . Il numero così definito si chiama costante d’Eulero
La dimostrazione di questo teorema, e di teoremi più generali di Abel e di Dirichlet che ora vedremo, è interessante perché permette di introdurre il concetto di sommazione per parti, da confrontare con quello di integrazione per parti. Nonostante che il carattere di una serie non dipenda dai primi addendi, in quest’appendice è bene specificare con cura i valori degli indici. Quindi scriveremo per esempio per intendere che il valore del primo indice della successione è . Inoltre, se indica una successione, con intendiamo la successione delle sue somme parziali:
Sia una successione. Con intendiamo la successione . Sia . La formula di sommazione per parti è:
Questa formula si dimostra facilmente scrivendo la somma per esteso:
Ci serve inoltre un risultato preliminare:
Lemma 40 Sia una serie tale che la successione delle somme parziali sia limitata e sia una successione positiva decrescente. Allora, la serie
converge assolutamente.
Dim. Si noti che la successione è convergente, , per il teorema della funzione monotona, e quindi limitata. Anzi,
Inoltre, . L’asserto del lemma segue perché ora proviamo che . Infatti,
Osservazione 41 Si noti che il Lemma 40 non richiede la convergenza della serie . _
Consideriamo ora la serie e notiamo che
Introducendo i numeri definiti da
e usando la regola di sommazione per parti con primo indice , le sue somme parziali si rappresentano come segue:
Dunque, per garantire la convergenza della serie , basta dare condizioni che garantiscano l’esistenza dei due limiti
| (1.14) |
| (1.15) |
Un criterio per questo è dato dal Teorema di Dirichlet, che immediatamente implica il criterio di Leibniz:
Teorema 42 (Teorema di Dirichlet) Sia una successione a valori positivi, decrescente e convergente a zero. Sia una serie tale che rimane limitata. Allora, la serie converge.
Dim. Infatti, il limite (1.14) è nullo perché è limitata e . Il limite (1.15) esiste per il Lemma 40. _ Dimostrazione del criterio di convergenza di Leibniz. La dimostrazione del criterio di Leibniz per la serie a segni alterni
con decrescente e convergente a zero, segue immediatamente: basta definire e e notare che
e quindi rimane limitata. Una diversa condizione per l’esistenza dei due limiti (1.14) e (1.15) è data dal teorema seguente:
Teorema 43 (Teorema di Abel) Sia una successione a valori positivi e decrescente. Sia una serie convergente. Allora, la serie converge.
Dim. Per ipotesi, esistono ambedue i limiti e . Dunque, esiste il limite (1.14). La successione , essendo convergente è anche limitata e quindi il limite (1.15) esiste per il Lemma 40. _
In questo capitolo studiamo le successioni e le serie di funzioni. Studiamo quindi particolari metodi per approssimare una data funzione mediante serie i cui termini sono funzioni elementari: monomi o funzioni trigonometriche.
Ricordiamo, dal Par. 1.5.1, che una successione di funzioni è una trasformazione che ad ogni numero naturale associa una funzione definita su un dominio , lo stesso per ogni . Stando così le cose, il problema della convergenza della successione di funzioni si studia per ogni fissato ; ossia si studia una successione numerica per ogni valore del parametro . Se la succesisone converge a per ogni , si dice che la successione converge puntualmente ad su . In realtà questo è un modo piuttosto semplicistico di procedere. Le applicazioni richiedono infatti di studiare la convergenza rispetto ad opportuni concetti di “distanza” tra funzioni. Ciò è quanto facciamo in questo capitolo. Notazione. Da ora in poi di regola useremo una notazione meno “elementare”: per indicare una funzione invece di scrivere scriveremo semplicemente . Invece, col simbolo intenderemo il valore che la funzione assume nel punto . In certi casi questo può condurre ad ambiguità ed allora useremo notazioni del tipo per indicare la funzione che ad associa . Va detto che la notazione non si può usare per specifiche funzioni: la funzione si indicherà semplicemente con . Dunque, successioni e serie di funzioni di regola si indicheranno con la notazione
ecc. Invece scriveremo esplicitamente quando dovremo considerare successioni o serie di funzioni particolari, per esempio
Noi considereremo funzioni definite su un fissato insieme che sarà sempre un intervallo. Specificheremo volta per volta se tale intervallo deve essere limitato e/o chiuso. Inoltre, non considereremo tutte le possibili funzioni definite su , ma le funzioni di una delle tre classi seguenti:
L’insieme è ora un intervallo qualsiasi.
L’insieme è ora un intervallo qualsiasi. Si noti la presenza del segno e del quadrato. Ovviamente, se la funzione prende valori reali, . Però molto spesso la funzione prende valori complessi e in tal caso il segno di modulo è necessario.
Osservazione 44 L’integrale che usiamo è l’integrale di Riemann. Si ricordi che una funzione integrabile secondo Riemann è necessariamente limitata. Usando questa proprietà, si potrebbe mostrare che, se l’intervallo è limitato, i due insiemi ed hanno i medesimi elementi. I due insiemi invece sono diversi se è illimitato o se si usano concetti diversi di integrale, che permettono di integrare anche funzioni illimitate. A noi interessa sapere che:
I tre insiemi sopra definiti sono spazi lineari, nel senso visto nei corsi di geometria, rispetto alle operazioni
In questi spazi lineari si introduce una distanza come segue:
(si noti che il massimo esiste, dal teorema di Weierstrass, perché l’intervallo è limitato e chiuso.) La distanza sopra definita si indica anche col simbolo1
e sono definite da
Si noti che in questi simboli l’intervallo è sottinteso e che spesso si scrive, rispettivamente,
usando il simbolo di “norma della differenza”, al posto di quello di distanza
Osservazione 45 Non ci serve essere precisi su questo. Però va detto che solamente la norma è effettivamente una norma e che solo è effettivamente una distanza. Infatti, se , se per ogni e se per mentre , allora , nonostante che e siano tra loro diverse. _
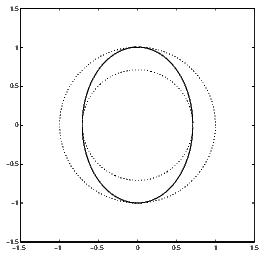
Accade che
quando il grafico di sta in un “tubo” di ampiezza intorno a quello di , come in figura 2.1. Si noti che il “tubo” può essere disegnato intorno ad una qualsiasi delle due funzioni. Ciò fatto si richiederà che il grafico dell’altra stia in tale “tubo”.
La figura a sinistra descrive la fascia di ampiezza ε centrata nel grafico della funzione f all’interno della quale è contenuto il grafico di g. Parimenti, la figura a destra descrive la fascia di ampiezza ε centrata nel grafico della funzione g all’interno della quale è contenuto il grafico di f.
Invece, quando accade che è minore di l’area del trapezoide di , ossia l’area della superficie compresa tra i grafici delle due funzioni. La figura 2.2, a sinistra, riporta il grafico di ed a destra quello di (per le medesime due funzioni e ) con tratteggiata la regione la cui area deve essere “piccola” se si vuole che queste “distino di poco” rispettivamente in ed in . La figura suggerisce che la distanza, nel senso , o , tra due funzioni possa essere “piccola” anche se i due grafici diventano “molto distanti” per certi valori di .
La prima figura rappresenta il grafico della funzione ∣f(x) − g(x)∣ la cui area è data da d1(f, g). La seconda figura rappresenta il grafico della funzione ∣f(x) − g(x)∣2; la radice quadrata della sua area è data da d2(f, g).
Scriviamo ora esplicitamente la definizione di convergenza rispetto alla distanza . Questo tipo di convergenza si chiama convergenza uniforme
Per contrasto, diamo la definizione di convergenza puntuale: la successione converge puntualmente ad su quando per ogni e per ogni esiste un numero tale che se si ha, per questo particolare numero , . Cambiando il punto cambia anche il numero . Si ha convergenza uniforme quando si può trovare un numero che va bene per ogni . Diamo ora la definizione di convergenza in ed in .
La convergenza in si chiama anche convergenza in media e la convergenza in si chiama anche convergenza in media quadratica mentre, come si è già detto, la convergenza in si chiama convergenza uniforme.
Osservazione 46 Supponiamo che la successione di funzioni sia definita su un dominio , . Se la successione converge uniformemente su , essa converge uniformemente sia su che su e, viceversa, se la successione converge uniformemente su e anche su , essa converge uniformemente anche su . Asserto analogo vale anche per la convergenze in media e per la convergenze in media quadratica. _
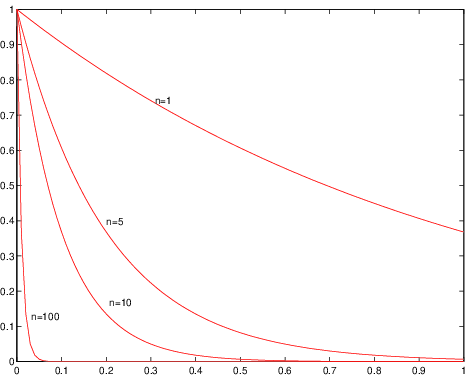
Vediamo ora due figure che illustrano il significato della convergenza uniforme e della convergenza in media. La fig. 2.3 a sinistra suggerisce la convergenza uniforme. La figura a destra vuol suggerire la convergenza in media, e vuol sottolineare che la convergenza in media non implica la convergenza puntuale. I grafici rappresentati a destra sono quelli delle funzioni con , , , . Si provi dettagliatamente, facendo uso della definizione, che la successione , , converge a zero in media ed in media quadratica, ma non uniformemente.
La figura a sinistra descrive i grafici di due funzioni che sono “molto vicini” fra loro nel senso della d∞; la figura a destra mostra i grafici delle funzioni e − t, e − 5t, e − 10t, e − 100t; esse sono infinitesime e descrescenti. Inoltre, per ogni n, e − n…0 = 1.
Infine, enunciamo il lemma seguente, immediata conseguenza del teorema di confronto per i limiti. La dimostrazione è lasciata per esercizio.
Lemma 47 Sia una successione di funzioni su un intervallo . Su tale intervallo sia anche definita una funzione . Sia una successione numerica tale che
allora la successione converge uniformemente a .
allora la successione converge a in .
allora la successione converge a in .
Su si può definire un prodotto interno o prodotto integrale come segue: siano e due funzioni a quadrato integrabile. Si può provare che il loro prodotto è integrabile. Definiamo allora il prodotto interno delle due funzioni e ponendo2
Si noti che se le funzioni prendono valori reali allora il segno di coniugio non ha alcun effetto; se però esse prendono valori complessi il coniugio è importante perché è grazie ad esso che si ottiene
Quest’uguaglianza giustifica il termine “prodotto interno” (o “prodotto scalare”): nel caso dei “vettori ordinari” di si ha infatti
Diciamo che due funzioni e sono ortogonali in quando
Naturalmente, per dire che è ortogonale a , scriveremo
Una proprietà importante del prodotto interno in è che per esso vale il teorema di Pitagora:
Teorema 48 Se allora .
Dim. Infatti si ha
In particolare,
Osservazione 49 Va notato esplicitamente che non esiste nessun concetto analogo a quello di prodotto interno per le distanze in o di . _
La sola convergenza puntuale è troppo debole per avere proprietà importanti di qualche tipo. Infatti:
Per vedere un esempio, ricordiamo che i numeri razionali sono numerabili, ossia sono immagine di una successione iniettiva. Sia questa successione e definiamo la funzione
Ciascuna delle funzioni è integrabile, con integrale uguale a zero, perché è zero salvo che in un numero finito di punti. La successione converge alla funzione di Dirichlet, che vale sui razionali e vale sugli irrazionali. Questa funzione non è integrabile.
Un esempio è il seguente: sia e sia . Ciascuna funzione è continua, ma la successione di funzioni converge puntualmente su alla funzione
Questa funzione è discontinua. E’ per questa ragione che vanno introdotti concetti più restrittivi di convergenza. In questo paragrafo presentiamo le relazioni tra il concetto di convergenza uniforme e le proprietà di limite, derivabilità ed integrazione3. Il teorema centrale è il seguente:
Teorema 50 Sia una successione di funzioni, definite su un intervallo , ciascuna delle quali è continua in un punto . Se la successione converge ad una funzione uniformemente su allora anche la funzione è continua in .
Omettiamo la dimostrazione. Ricordando che le funzioni continue su un intervallo limitato e chiuso sono integrabili si ha:
Corollario 51 Sia una successione di funzioni continue su un intervallo limitato e chiuso . La successione converga uniformemente su ad una funzione . Allora, la funzione è continua e quindi anche integrabile su .
Sotto le ipotesi del corollario precedente, può dirsi di più: l’integrale di è il limite degli integrali delle . Ossia:
Teorema 52 Sia una successione di funzioni continue su un intervallo limitato e chiuso . La successione converga uniformemente su ad una funzione . Allora,
| (2.1) |
Dim. Ricordando la definizione di limite, dobbiamo provare che per ogni esiste tale che per ogni si ha
Dalla linearità e dalla proprietà di monotonia degli integrali,
e quindi basta provare che
per suffcientemente grande. Ricordiamo che la successione converge ad uniformemente su : scelto un qualunque esiste tale che, per ogni si ha
e quindi anche
con la lunghezza di . L’asserto segue scegliendo e . _
Osservazione 53 Ricordiamo, dall’Osservazione 46, che se e se la successione converge uniformemente su , essa converge uniformemente sia su che su . D’altra parte, l’integrale su è la somma dei due integrali su e su . Quindi il teorema si applica facilmente anche a successioni uniformemente convergenti di funzioni continue a tratti e questo è suffciente per molte applicazioni. Si potrebbe però provare che la semplice integrabilità di ciascuna delle funzioni e la convergenza uniforme della successione ad implica che la è integrabile e che vale l’uguaglianza (2.1). _
Sia primitiva di . La convergenza della successione non implica la convergenza della successione . Questo si vede facilmente scegliendo per ogni , ed per ogni . Le cose cambiano se si assegna il comportamento che le devono avere in un medesimo punto :
Teorema 54 Sia una successione di funzioni continue su un intervallo e sia
Supponiamo che
e che la successione converga uniformemente ad . In tal caso la successione converge uniformemente alla funzione
Dim. Ricordiamo che la funzione è continua, come limite uniforme di una successione di funzioni continue. Dunque l’espressione proposta per ha senso. La differenza si stima così:
La successione numerica tende a zero per ipotesi, mentre la successione numerica
tende a zero per il Teorema 52. L’asserto segue quindi dal Lemma 47. _ Vediamo ora le relazioni tra derivazione e convergenza uniforme. E’ facile trovare esempi che mostrano che il limite uniforme di una successione di funzioni derivabili può non essere derivabile.
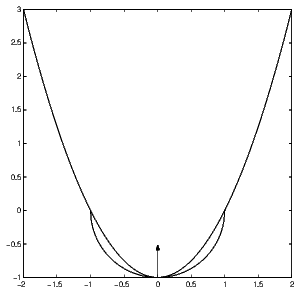
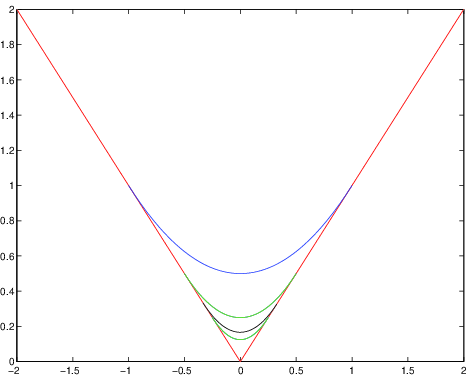
Esempio 55 Consideriamo la successione di funzioni
Ciascuna di queste funzioni è derivabile ma la successione di funzioni converge uniformemente alla funzione non derivabile . Il grafico di alcune di queste funzioni è in figura 2.4. _
Relativamente all’intervallo [ − 1, 1], il grafico della funzione fn è una parabola con vertice nel punto (0, 1/2n); per n → + ∞, tale grafico “tende” al grafico della funzione y = ∣x∣ (non derivabile in x = 0).
Vale però:
Teorema 56 Sia una successione di funzioni derivabili su un intervallo . Supponiamo che:
In tal caso la successione converge uniformemente su ad una funzione che è derivabile, ed inoltre ; ossia
Dim. Per ipotesi,
L’asserto segue quindi dal Teorema 54. _
Le serie di funzioni si definiscono in modo del tutto analogo alle serie numeriche: se é una successione di funzioni, la serie corrispondente si indica col simbolo
Se é necessario indicare i valori presi dall’indice scriveremo per esempio
Il significato del simbolo di serie é il seguente: supponendo che l’indice prenda tutti i valori maggiori od uguali a , si costruisce la nuova successione
Se la successione di funzioni converge uniformemente, si dice che la serie converge uniformemente; se la successione di funzioni converge in oppure in , si dice che la serie converge in tal senso. Enunciamo il teorema seguente, senza dimostrarlo:
Teorema 57 Sia convergente la serie di numeri positivi
Valga inoltre
ove oppure oppure . Sotto queste ipotesi, esiste una funzione (rispettivamente in , oppure ) tale che la serie
converge nel senso corrispondente a .
Sia una serie di funzioni. Si dice che questa serie converge normalmente (in oppure in ) quando converge la serie
(con uguale a , ). L’asserto del teorema precedente si esprime anche dicendo che una serie che converge normalmente è anche una serie convergente. Il viceversa non vale. Nel caso di , ossia per la convergenza uniforme, il test per la convergenza dato nel Teorema 57 si chiama anche test di Weierstrass A parte questo teorema, di dimostrazione diffcile, i teoremi visti per la convergenza delle successioni di funzioni si adattano facilmente allo studio della convergenza delle serie. Enunciamo in particolare:
Teorema 58 Una serie di funzioni continue converga uniformemente su ad una funzione . Allora la funzione è continua e, se è limitato e chiuso, vale
Sia una successione di funzioni derivabili, convergente puntualmente su ad una funzione . Supponiamo che la serie converga uniformemente su ad una funzione . Allora la funzione è derivabile, con derivata ed inoltre la serie converge ad uniformemente su .
Esempio 59 Consideriamo la serie
Questa serie converge puntualmente su . ossia converge per ogni . Infatti, se ogni termine della serie è nullo e quindi la somma della serie è ; se allora è lecito scrivere
Dunque, si ha
Dunque la somma della serie non è continua e quindi la serie, pur convergendo puntualmente su , non converge uniformemente. _
Si chiamano serie di potenze le serie di funzioni della forma
| (2.2) |
ottenute a partire dalla successione di monomi . Si noti che il primo valore dell’indice è ora ma niente vieta che sia ossia che la serie “parta” per esempio con indice . Se esiste tale che per , allora la serie di potenze si riduce ad un polinomio: le serie di potenze generalizzano i polinomi. Il numero si chiama il centro della serie e la serie di potenze converge sempre per (e ivi converge ad ). Potrebbe non convergere in nessun altro punto.
Esempio 60 Si consideri la serie seguente, di centro :
Si fissi il valore di e sia tale che . Allora, per , si ha
Dunque, se , il termine generale della serie non tende a zero, e quindi la serie non converge. _
Vale però:
Teorema 61 (Teorema di Abel) Una serie di potenze converga in un punto e sia
Allora, la serie di potenze converge uniformemente in per ogni .
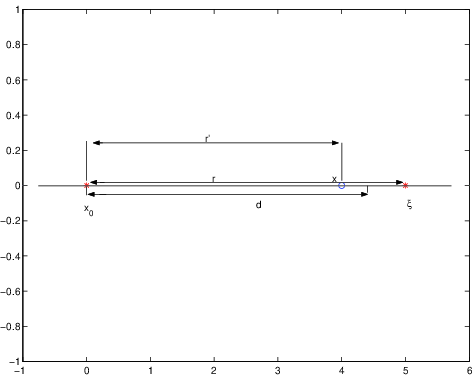
Dim. Si guardi la figura 2.5 per seguire questa dimostrazione.
Sulla retta reale sono individuati gli intorni destri del punto x0 di raggio r’ < r < d, rispettivamente.
Sia e sia così che
e quindi
La convergenza in implica che la successione è limitata (anzi tende a zero):
Inoltre,
Dunque, per si ha
con e quindi con . La convergenza uniforme segue dal criterio di Weierstrass, Teorema 57. _ Questo risultato in particolare implica che se una serie di potenze converge allora l’insieme su cui essa converge è un intervallo centrato in (e non si esclude che sia ridotto al solo , oppure che sia tutta la retta). Questo si chiama l’intervallo di convergenza della serie di potenze e si chiama raggio di convergenza la sua semiampiezza. Il raggio di convergenza può essere nullo, si veda l’esempio 60. Può essere un numero finito non nullo oppure può essere : è un numero finito non nullo nel caso particolare della serie geometrica, è nel caso in cui la serie di potenze si riduca ad un polinomio, ma non solo in tal caso:
Osservazione 62 Consideriamo la serie
fissato , si trova una serie numerica, convergente per ogni valore del parametro , come si vede facilmente usando il criterio del rapporto. _
Inoltre, la dimostrazione del Teorema 61 mostra che:
Teorema 63 (Teorema di Abel) Sia il raggio di convergenza di una serie di potenze e sia tale che . La serie di potenze converge assolutamente e quindi incondizionatamente nel punto .
Ciò mostra che l’ordine dei termini di una serie di potenze non influisce sulla somma della serie nei punti interni all’intervallo di convergenza. Invece, niente può dirsi in generale del comportamento della serie negli estremi dell’intervallo di convergenza, come mostrano gli esempi seguenti.
Esempio 64 Consideriamo la serie di potenze
| (2.3) |
fissato si trova una serie numerica e si vede facilmente, dal criterio del rapporto, che la sere converge per ogni con , diverge se . Dunque il raggio di convergenza è . Se oppure si trovano rispettivamente le due serie
La prima divergente e la seconda convergente. Si è detto che la somma di una serie di potenze non dipende dall’ordine degli elementi nei punti interni dell’intervallo di convergenza. Quest’esempio mostra che, invece, può dipendere dall’ordine degli elementi se è uno degli estremi dell’intervallo di convergenza. Mostriamo ora una serie di potenze che converge in ambedue gli estremi dell’intervallo di convergenza. La serie è
| (2.4) |
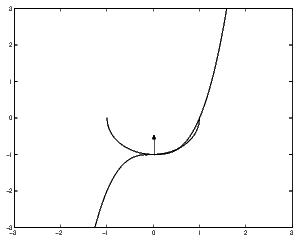
Di nuovo, fissato , si usi il criterio del rapporto per studiare la convergenza della serie numerica che si ottiene. Si vede che si ha convergenza per , estremi inclusi, mentre la serie diverge per . Infine, mostriamo una serie di potenze che diverge in ambedue gli estremi dell’intervallo di convergenza. Questa è la serie
| (2.5) |
Questa è una serie geometrica di ragione e quindi converge se e solo se , estremi esclusi. Si noti che la somma di questa serie è la funzione
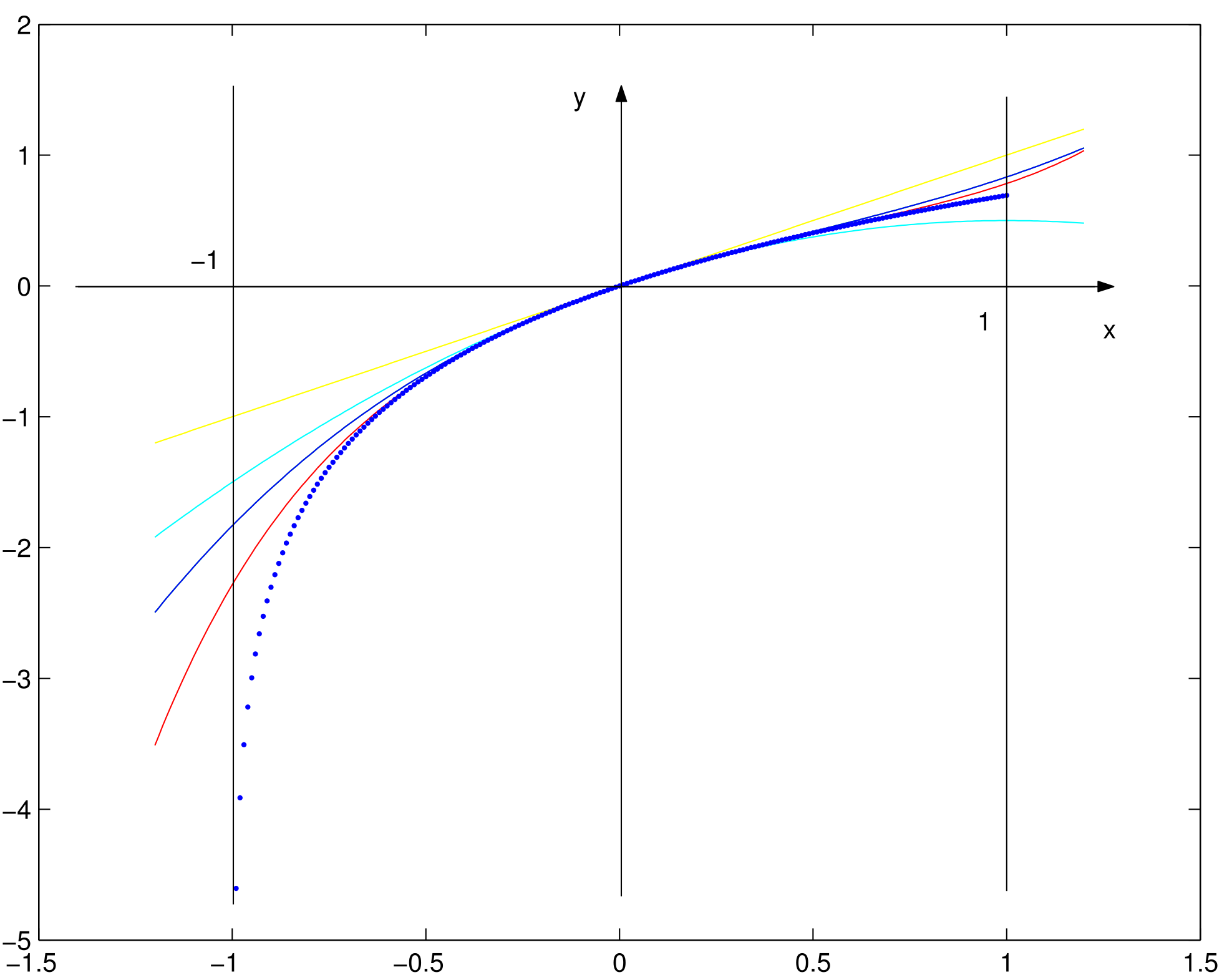
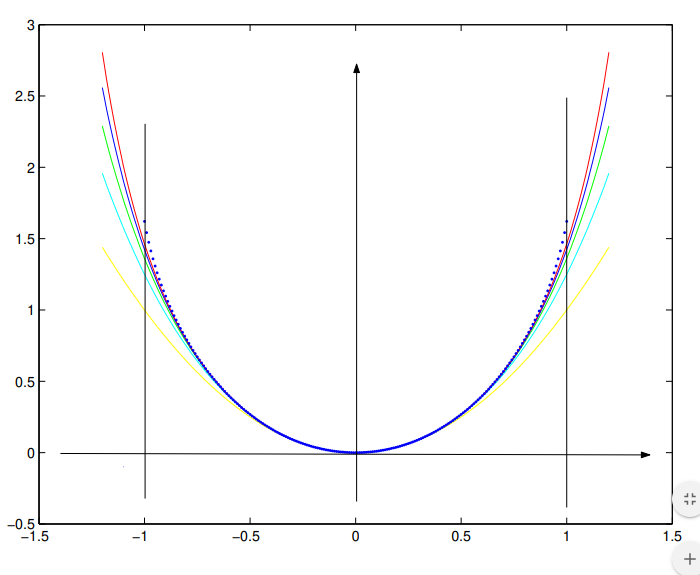
una funzione di classe . La ragione per cui la serie corrispondente non debba convergere negli estremi sembra misteriosa, e verrà chiarita al paragrafo 2.4.2. E’ interessante vedere i grafici di alcune delle somme parziali delle tre serie introdotte sopra. L’intervallo di convergenza delle serie è . I grafici delle somme parziali sono disegnati su un intervallo un po’ più grande e, punteggiato, si riporta anche il grafico della somma della serie, ovviamente solo sull’intervallo . La prima e la seconda serie sono alla figura 2.6
A sinistra: Nel piano cartesiano sono indicate le due rette e . Sono rappresentati i grafici delle funzioni . Il grafico della retta è al di sopra del grafico di tutte le altre funzioni Sulla retta compaiono i termini di una serie armonica divergente a meno infinito; sulla retta compaiono i termini di una serie convergente. Il grafico della funzione somma della serie illustra il fatto che la funzione somma della serie ha un asintoto orizzontale in mentre è definita in
A destra: Nel piano cartesiano sono indicate le due rette e . Sono rappresentati i grafici delle funzioni . Il grafico della parabola è al di sotto del grafico di tutte le altre funzioni Sulla retta e sulla retta compaiono i termini di una serie convergente. Il grafico della funzione somma della serie illustra il fatto che la funzione somma della serie è definita in
L’ultima serie è alla figura 2.7.
Nel piano cartesiano sono indicate le due rette e . Sono rappresentati i grafici delle funzioni e il grafico della funzione somma della serie . Sulle rette compaiono i termini di una serie oscillante. La funzione somma della serie è definita su tutto ma la serie è convergente solo nellè?intervallo aperto
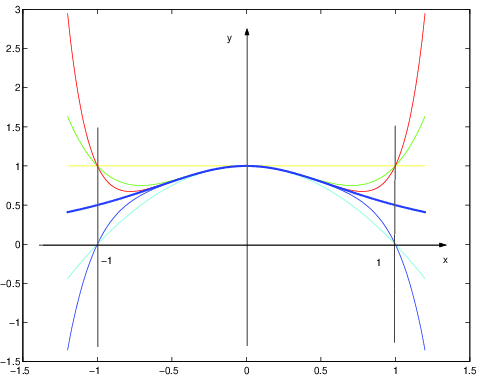
Il grafico punteggiato (tratto spesso) in questo caso rappresenta la funzione , che è la somma della serie sul solo intervallo . E’ stato disegnato in un intervallo più grande per sottolineare che la questa funzione è regolare anche nei punti e . _
Inoltre, la convergenza essendo uniforme, dal Teorema 50:
Corollario 65 La somma di una serie di potenze è continua nei punti interni all’intervallo di convergenza.
Si potrebbe inoltre provare che:
Teorema 66 Sia il raggio di convergenza della serie . Le due serie di potenze
hanno lo stesso raggio di convergenza e questo è uguale ad .
Le due serie in (2.6) si dicono ottenute derivando termine a termine o integrando termine a termine la serie data. Esse convergono uniformemente in e quindi, usando i teoremi 52 e 56, si trova l’uguaglianza
In particolare quindi anche la serie derivata può a sua volta venir derivata termine a termine e ciò tante volte quante si vuole. Dunque:
Corollario 67 La somma di una serie di potenze di raggio di convergenza non nullo è una funzione di classe nell’intervallo di convergenza.
Chiediamoci ora come sia possibile calcolare il raggio di convergenza di una serie di potenze. Esiste una formula per il raggio di convergenza, che non possiamo presentare. Possiamo però presentare due test particolari, che si ottengono per confronto con la serie geometrica. Il primo si può applicare quando si ha per ogni (e basta che questa condizione sia soddisfatta per maggiore di un opportuno ).
Teorema 68 Supponiamo che per ogni e che esista, finito o meno,
Allora il raggio di convergenza della serie è
Dim. Limitiamoci a considerare il caso . Applichiamo il criterio del rapporto per la convergenza della serie di numeri
con fissato. Il criterio del rapporto asserisce che condizione suffciente di convergenza è che per suffcientemente grande valga
| (2.6) |
La serie diverge se vale la disuguaglianza opposta, con . Proviamo che si ha convergenza se
In tal caso, tale che
| (2.7) |
Sia . Il teorema di permanenza del segno mostra l’esistenza di un numero tale che per ogni vale
Essendo , la serie converge (si ricordi (2.6)). In modo analogo si trattano gli altri casi. _ Ripetiamo che il teorema precedente non può usarsi se infiniti coeffcienti sono nulli. Usando il criterio della radice invece del criterio del rapporto si prova invece:
Si noti che il Teorema 69 può usarsi anche se infiniti coeffcienti sono nulli. Mostriamo ora che esistono serie di potenze il cui raggio di convergenza non può determinarsi né col criterio del rapporto né con quello della radice4
Esempio 70 Si consideri la serie
E’
Quindi,
E’:
e quindi
In casi di questo tipo, conviene considerare come una parametro e studiare la convergenza della serie numerica ottenuta, per ogni valore di . Usando il criterio della radice per ogni fissato, si vede che
se e quindi se , per qualche . Dunque il raggio di convergenza è almeno . D’altra parte, se allora per , pari, si trova
Quindi, il termine generale non tende a zero e la serie non converge. Quindi, il raggio di convergenza è uguale ad . _
Le operazioni sulle serie di potenze si eseguono con le regole delle operazioni sulle serie numeriche, per ogni fissato valore del parametro . Ci interessa però notare esplicitamente:
Somma di serie Siano , due serie di potenze col medesimo centro e con raggio di convergenza rispettivamente ed . Sia
Allora, ambedue le serie convergono per e quindi la loro somma può scriversi nuovamente come serie di potenze di centro , convergente per :
Il raggio di convergenza della serie somma può essere maggiore di . Per esempio, se , allora la serie somma ha raggio di convergenza anche se . Ciò però può aversi solamente se . Infatti, se per esempio allora . Infatti, scrivendo
si vede che il raggio di convergenza della prima serie è almeno uguale a
e questo sarebbe maggiore di se fosse . L’operazione di somma può usarsi anche “al contrario” per calcolare il raggio di convergenza in certi casi nei quali falliscono sia il criterio del rapporto che quello della radice:
Esempio 71 Torniamo a considerare la serie vista all’esempio 70. La serie di quest’esempio si può vedere come somma delle due serie
Ora, rinominando l’indice della prima serie, si trova
Sostituendo si trova la serie di potenza
a cui si può applicare sia il criterio del rapporto che quello della radice. Il raggio di convergenza è per la serie della variabile , e quindi per la serie della variabile . Analogamente, la seconda serie converge per . Dunque, il raggio di convergenza della serie somma è esattamente . _
Unicità della serie di potenze Mostriamo che la serie di potenze che converge ad una funzione , se esiste, è unica:
due serie di potenze con raggio di convergenza rispettivamente ed . Sia . Se
per ogni con allora per ogni e quindi .
per allora . Posto si trova infatti e quindi l’uguaglianza precedente si scrive
Dunque si ha anche
Calcolando per si vede e dunque
Il procedimento può quindi ripetersi trovando , e così via. _
Prodotto alla Cauchy di serie di Potenze Consideriamo le due serie di potenze col medesimo centro
Calcoliamo tutti i possibili prodotti di un termine della prima con un termine della seconda e raccogliamo i coeffcienti dei termini con la medesima potenza . Si trova quando si fa il prodotto di con tutti i termini della forma
Ossia, il coeffciente di viene ad essere
Ciò suggerisce la definizione di prodotto alla Cauchy, definito da
E’ appena il caso di notare che il “nome“ degli indici non ha effetto sulla somma della serie. Si sono usati “nomi” diversi (, ed ) solo per chiarezza. Il teorema che si può provare è il seguente:
Teorema 73 Due serie di potenze abbiamo raggio di convergenza rispettivamente ed coan . La serie prodotto alla Cauchy ha raggio di convergenza almeno uguale ad .
Osservazione 74 Consideriamo l’esempio seguente:
Il prodotto alla Cauchy contiene potenze solo se può scriversi nella forma
per certi valori di e . Il coeffciente di questa potenza è la somma di tanti numeri quanti sono i modi di scrivere in tale forma. Ma ora,
e il loro prodotto è
Vedremo, al paragrafo 2.4.3, un modo diverso per rappresentare questa funzione come somma di una serie di potenze, che calcola i coeffcienti della (unica!) espansione in serie di potenze facendo derivate. precisamente vedremo che il coeffciente di è
In questo modo, dato , si calcola facilmente in quanti modi questo si può rappresentare come somma di tante “monete” di valore e tante “monete” di valore . _
Le operazioni algebriche e le operazioni di limite possono anche calcolarsi tra numeri complessi. Quindi, le serie di potenze possono trattarsi anche nel campo complesso. Il Teorema 61 e il Teorema 63 si riformulano come segue:
Teorema 75 (Teorema di Abel) Una serie di potenze
nel campo complesso, converge sempre nel punto . Se converge anche in altri punti, allora essa converge in un disco aperto di centro e raggio (si scrive se la serie converge per ogni ). La convergenza è uniforme in ogni disco di centro e raggio ; è assoluta in ciascun punto interno al disco di convergenza.
Per convergenza assoluta nel caso di serie di potenze a valori complessi, si intende la convergenza della serie5
La dimostrazione è del tutto analoga a quella vista per le serie di potenze reali. Però, ora può mostrarsi di più: sia la somma di una serie di potenze di raggio di convergenza . Esiste almeno un punto tale che , nel quale la funzione non è regolare. Ciò chiarisce la stranezza notata all’Esempio 64. Per vale
e la funzione è di classe . Non si vede quindi quale fenomeno possa bloccare la convergenza della serie. Se però la serie si legge nel campo complesso, allora
e la funzione non è definita nei punti , che distano dal centro della serie.
Sia una funzione di classe in un intorno di . Ad essa può associarsi la serie di Taylor
Questa si chiama la serie di Taylor della funzione . Questa serie può non convergere e, se converge, può non convergere alla funzione , come mostra l’esempio seguente:
Esempio 76 Sia
Questa funzione è di classe su e le sue derivate in sono tutte nulle. Dunque la serie di Taylor di centro associata ad ha tutti i coeffcienti nulli: converge su alla funzione identicamente zero e non ad . _
Ci possiamo chiedere quindi sotto quali condizioni la serie di Taylor di effettivamente converga ad . Scrivendo la formula di Taylor di arrestata all’ordine e col resto in forma di Lagrange, si vede che
dove dipende da ed è compreso tra ed . La serie di Taylor converge ad quando il resto converge a zero. Una condizione perché ciò accada è:
Dim. Ricordiamo che per ogni si ha
Si osservi ora che
Il membro destro tende a zero e quindi, per il criterio del confronto, tende a zero uniformemente anche l’errore
La condizione del Teorema 77 è soddisfatta nel caso delle funzioni di cui correntemente si usano gli sviluppi di Taylor, almeno su un opportuno intervallo. La tabella seguente riporta alcune funzioni e il raggio di convergenza della relativa serie di McLaurin (ossia, della serie di Taylor di centro ).
Infine, studiamo la relazione tra parità di una funzione e sua serie di Taylor. Vale:
Teorema 78 Sia
La funzione è pari se e solo se sono nulli i coeffcienti di indice dispari; la funzione è dispari se e solo se sono nulli i coeffcienti di indice pari.
Dim. Sia sviluppabile in serie di Taylor. Se è dispari, essa si annulla in . Dunque . La sua derivata prima è pari ma la derivata seconda è dispari e quindi ossia vale anche . Iterando questo procedimento si vede che ogni è nullo. Se è pari, sono dispari tutte le sue derivate di ordine dispari e quindi sono nulli gli . Il viceversa è ovvio. _
Consideriamo il problema di Cauchy
Il coeffciente è costante. Per definizione, la soluzione è continua e quindi, dall’uguaglianza, è addiritture continuamente derivabile; e quindi
Così proseguendo,
e quindi, per ,
Dunque, la soluzione è di classe e verifica le condizioni del Teorema 77 su tutti gli intervalli chiusi contenenti . Dunque, la soluzione si esprime in forma di serie di potenze
D’altra parte si verifica immediatamente che questa è la serie dell’esponenziale e quindi si ritrova il risultato noto
Consideriamo ora il sistema di equazioni differenziali lineari
| (2.8) |
ove è un vettore di ed è una matrice che è costante, ossia non dipende n’e da n’e da . Vogliamo rappresentare la soluzione di questo sistema che verifica l’ulteriore condizione
E’ facile vedere che tutto ciò che abbiamo detto sulle serie di potenze e sulle serie di Taylor si estende senza cambiamenti a funzioni a valori vettori o matrici e quindi è ancora vero che
Questa serie si indica col simbolo
| (2.9) |
Ciò definisce l’esponenziale di una matrice, e la (2.9) rappresenta in forma compatta le soluzioni dell’equazione differenziale lineare a coeffcienti costanti (2.8):
Osservazione 79 Va notato un fatto importante: l’esponenziale di matrice può essere un polinomio. Per esempio, se
allora e quindi
è un polinomio di primo grado. Si prova invece che se
allora
Proprietà importanti della matrice esponenziale sono espresse dal teorema seguente, che non proviamo:
L’introduzione dell’esponenziale della matrice permette anche di rappresentare la soluzione del problema
Procediamo esattamente come già si è visto (nel corso di Analisi Matematica 1) per l’equazione scalare: moltiplicando i due membri per si trova
| (2.10) |
La regola della derivata del prodotto si estende al prodotto di una matrice per un vettore6 e quindi la (2.10) è
Integrando i due membri da a si trova
| (2.11) |
Moltiplichiamo i due membri di (2.11) per e usiamo le proprietà nel teorema 80. Si trova
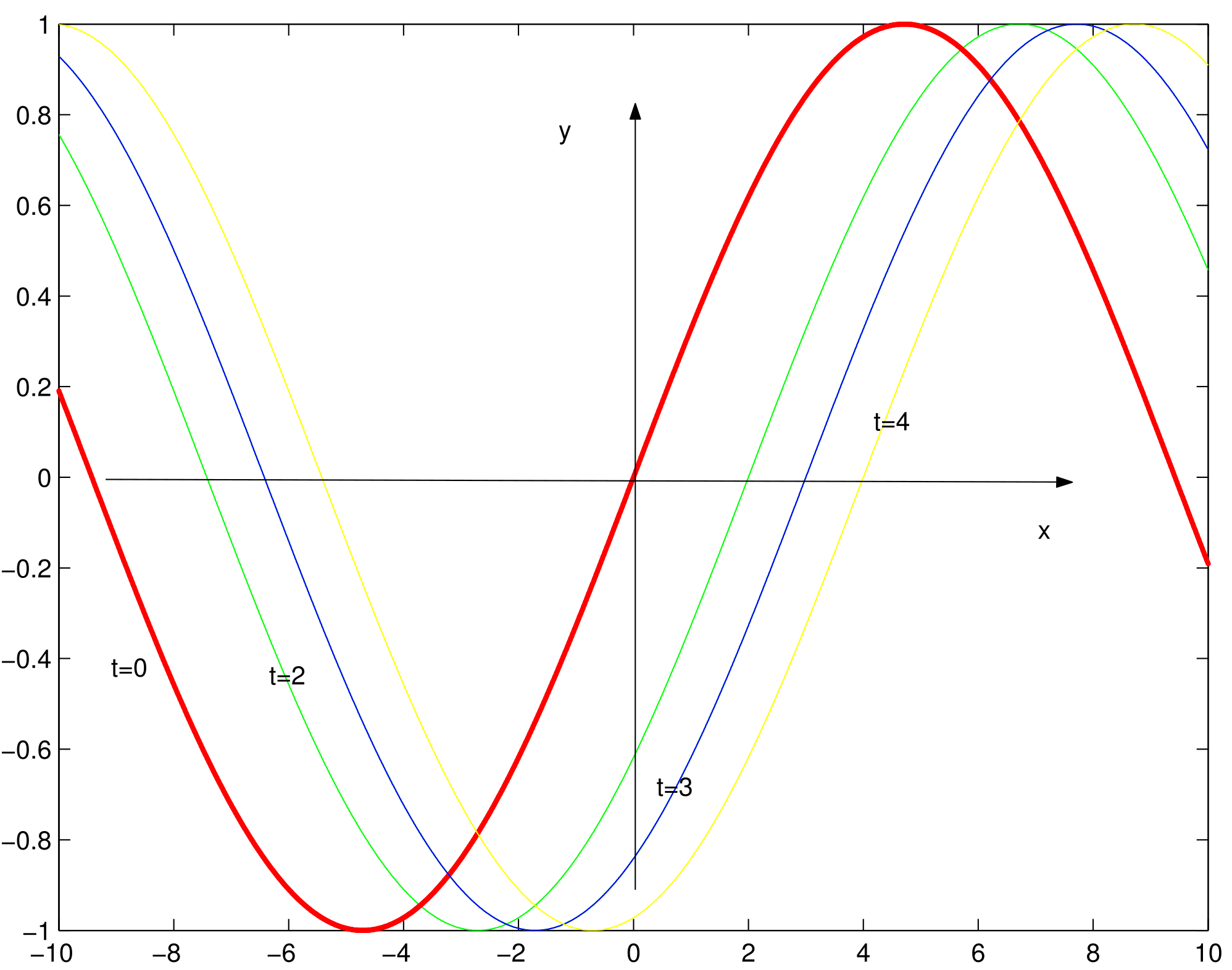
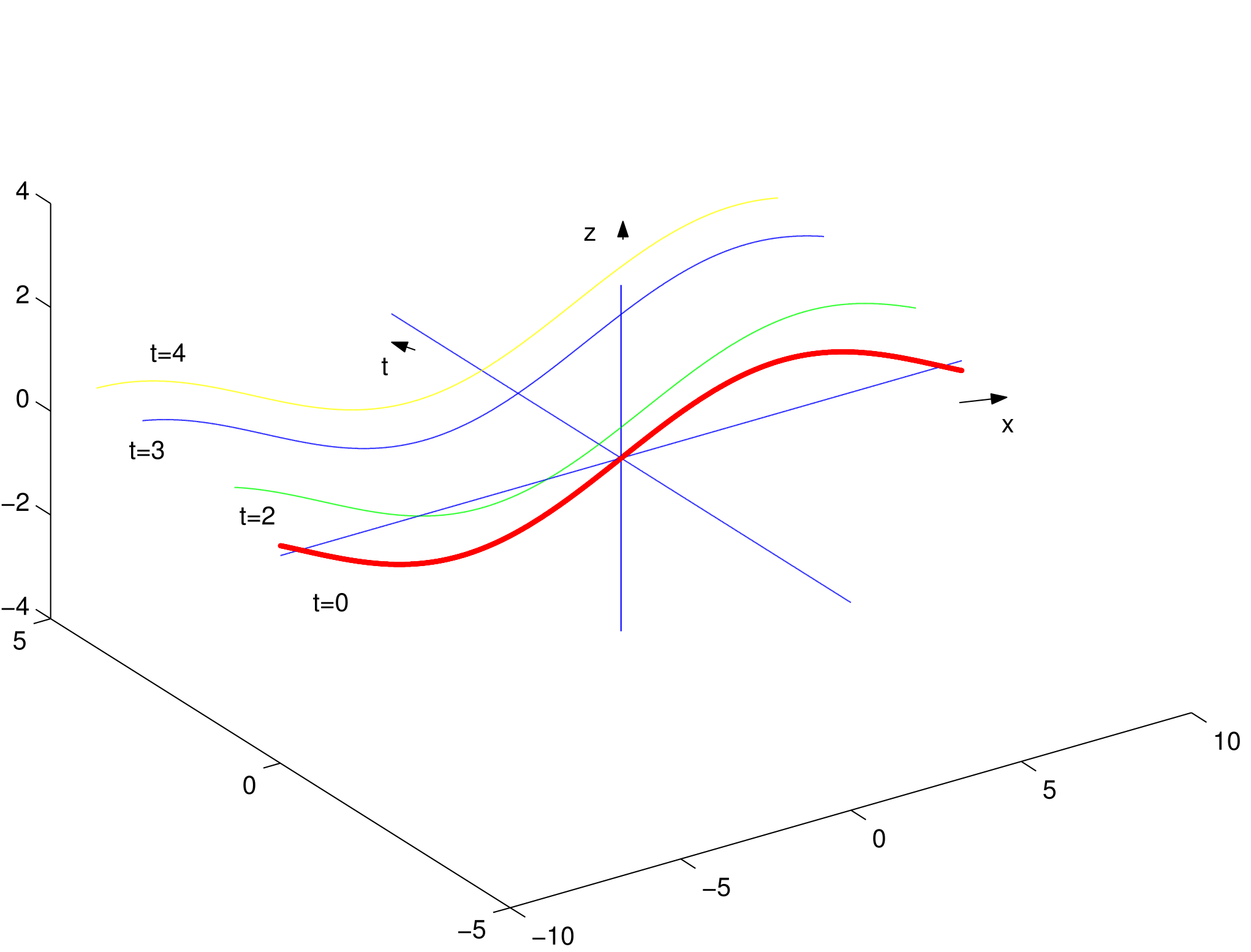
Oltre alle serie di potenze, nelle applicazioni si incontrano molti altri tipo di “serie di funzioni”, la cui teoria comunque è sostanzialmente più complessa e viene qui esaminata per sommi capi nel caso di gran lunga più importante delle serie di Fourier. Si chiamano serie di Fourier le serie del tipo
| (2.12) |
I coeffcienti e sono reali. Se si trova
Si noti che, usando , si potrebbe assorbire il coeffciente nella serie scritta con invece che con . Vedremo che c’è una buona ragione per separare dagli con . Ovviamente una serie di Fourier non sempre converge. La convergenza sarà implicata da opportune proprietà dei coeffcienti e . Per esempio, certamente si ha convergenza (uniforme) quando , con . Il problema della convergenza puntuale o uniforme delle serie di Fourier comunque è assai delicato e lo illustreremo più avanti. Per ora notiamo che se la serie converge per un allora essa converge in ogni punto di forma con intero; e se converge per ogni essa converge per ogni e converge ad una funzione peridica di periodo . Per questa ragione, prima di studiare le serie di Fourier, vogliamo richiamare alcune proprietà delle funzioni periodiche.
Sia una funzione della variabile reale . Si dice che è periodica di periodo quando:
Teorema 81 Sia periodica di periodo e sia numero reale. La funzione ha periodo . In particolare, se , la funzione ha periodo .
La verifica è immediata:
Una funzione periodica non ha un solo periodo: se è un periodo anche , , ecc. sono periodi. L’insieme dei periodi positivi ha però un estremo inferiore che può essere nullo7. Molto spesso, quando si parla di “periodo” di una funzione periodica si intende che esista un minimo periodo positivo, e per periodo si intende tale numero8. Se è il (minimo) periodo di , allora si chiama la frequenza di mentre si chiama la frequenza angolare di . Per esempio, le funzioni e sono funzioni periodiche di periodo ovunque definite mentre è una funzione di periodo , che però non è ovunque definita.
Osservazione 82 Vediamo come i concetti precedenti si applicano alla serie di Fourier (2.12). Le funzioni e hanno (minimo) periodo e quindi tutti i termini della serie di Fourier hanno periodo (non necessariamente minimo) . Per questa ragione potremo limitarci a studiare la serie di Fourier sull’intervallo o su un qualsiasi altro intervallo di lunghezza , per esempio . La frequenza di e è mentre la loro frequenza angolare è
il coeffciente di nei due termini in posizione della serie di Fourier è la frequenza angolare . _
Vale:
Dim. Conviene provare la prima uguaglianza in due passi:
ossia proviamo l’uguaglianza richiesta nel caso particolare . Per questo sostituiamo nell’integrale a destra. Si trova
L’ultima uguaglianza vale perché la funzione è periodica di periodo e quindi .
Proviamo che vale
Ciò fatto, l’uguaglianza richiesta seguirà dal passo 1. Per capire questa parte del calcolo, si guardi la figura 2.8. Come suggerito dalla figura, scriviamo
| (2.13) |
La sostituzione mostra che
L’ultima uguaglianza vale perché è periodica di periodo e quindi . Tornando alla (2.13) si vede che
come volevamo provare.
Nel piano cartesiano è rappresentato il grafico di una funziona periodica; in particolare, sono evidenziate le parti di piano sottese dal grafico della funzione che, a motivo della periodicità, hanno la stessa area.
La seconda uguaglianza è conseguenza della prima perché
Si noti che nel teorema precedente non è necessariamente il minimo periodo. _
Ricordiamo le formule d’Eulero, incontrate nello studio delle equazioni differenziali lineari:
e quindi
Osservazione 84 Le formule d’Eulero mostrano che la funzione è periodica di periodo . E’ anche vero che l’estensione della funzione esponenziale al piano complesso
è periodica di periodo , ossia è periodica quando il suo argomento si muove parallelamente all’asse immaginario. _
Sommando e sottraendo membro a membro, si trovano le uguaglianze
Anch’esse vanno sotto il nome di formule d’Eulero Sostituendo queste espressioni in
si trova (si ricordi che )
ove ora i sono i numeri complessi
| (2.14) |
e quindi tali che
Si osservi che anche in questa scrittura il termine con ha un ruolo particolare: è reale. Sostituendo in
| (2.15) |
si trova
| (2.16) |
con i coeffcienti ancora dati da (2.14) e quindi con
| (2.17) |
E’ facile vedere che si fa anche il passaggio inverso: se valgono le (2.17) allora nella (2.16) i termini puramente immaginari si elidono e la somma (2.16) si riduce a (2.15), con coeffcienti reali. Un’espressione della forma (2.16) si chiama un polinomio trigonometrico Se valgono le (2.17), il polinomio trigonometrico (2.16) si può scrivere nella forma “reale” (2.15). L’espressione (2.15) è una somma parziale della serie di Fourier (2.12). Per questa ragione, la serie di Fourier (2.12) si può anche scrivere in “forma complessa”,
| (2.18) |
Il fatto importante da ricordare è che se vogliamo che questa serie corrisponda alla (2.12) le somme parziali vanno prese in modo simmetrico: le somma parziali sono
| (2.19) |
e non
| (2.20) |
con ed tra loro indipendenti. E infatti può accadere che per ed , indipendentemente, la (2.20) non ammetta limite nemmeno se (2.19) ammette limite per . Avremo bisogno di calcolare derivate e integrali di funzioni
della variabile reale , a valori numeri complessi. Per definizione,
e quindi
Essendo
si trova:
| (2.21) |
Per verificare la prima delle uguaglianze precedenti (con ) calcoliamo, usando le formule d’Eulero
L’asserto ora segue perchè, essendo per esempio
si ha
Le altre uguaglianze si provano in modo analogo.
Osservazione 85 a queste conclusioni si può arrivare in modo più elementare se si ricordano le formule di Werner. il primo integrale si può calcolare ricordando che
Più in generale, su un intervallo vale
| (2.22) |
Le uguaglianze precedenti mostrano che le funzioni
equivalentemente
sono due a due ortogonali in e tutte di norma uguale ad . Si dice brevemente che sono sistemi ortonormali in . Quest’osservazione suggerisce che l’ambiente in cui è più facile studiare la serie di Fourier sia lo spazio e non lo spazio .
Non è stato possibile introdurre in modo rigoroso lo spazio e ciò indica che lo studio della serie di Fourier è molto più complesso di quello delle serie di potenze, e può essere solo accennato. Consideriamo il polinomio trigonometrico
| (2.23) |
equivalentemente, se ,
| (2.24) |
Indichiamo questo polinomio trigonometrico col simbolo . Ovviamente, è una funzione continua e periodica su . Se i valori di su si conoscono, da questi si ricavano facilmente i coeffcienti ed i coeffcienti e . Infatti, moltiplicando i due membri dell’uguaglianza
per e integrando su si trova se . Altrimenti si trova
Analogamente,
(ossia, la formula per non si ottiene da quella di ponendo . Per questa ragione conviene scrivere separato dalla sommatoria). Vale inoltre:
L’identità precedente va sotto il nome di Identità di Parseval Si noti il significato di e di : questi numeri sono le medie integrali di . Analogamente, il membro sinistro dell’identità di Parseval è la media integrale di . Sia ora . Chiamiamo coeffcienti di Fourier della funzione i numeri
| (2.26) |
(se vogliamo scrivere la serie di Fourier con gli esponenziali complessi),
| (2.27) |
(se vogliamo scrivere la serie di Fourier nel campo reale). Si chiama serie di Fourier associata alla funzione la serie (2.12) con i coeffcienti dati da (2.27) o, equivalentemente, la serie (2.18) con i coeffcienti dati da (2.26). Per fissare le idee e scrivere formule più semplici, usiamo ora la serie di Fourier scritta mediante gli esponenziali complessi. Considerazioni del tutto analoghe valgono anche per la serie di Fourier scritta nel campo reale. Consideriamo la serie
e la sua somma parziale –ma
Si noti che è il polinomio trigonometrico (2.23) e che, se , allora può scriversi nella forma (2.24). Si può provare:
Inoltre, la serie converge incondizionatamente, ossia la serie converge, e sempre alla medesima funzione , anche riordinandone i termini.
Dunque, la successione delle somme parziali converge ad nella distanza di . Sottolineiamo nuovamente che il teorema riguarda e non per esempio una somma . Anche se i sono i coeffcienti di Fourier di , niente può dirsi del comportamento di questa serie per , in modo indipendente. Diamo un’interpretazione geometrica di . Consideriamo il sottospazio lineare ,
Che è uno spazio vettoriale di dimensione . Si ha:
Teorema 88 La somma parziale di è l’elemento di che ha minor distanza da nel senso della distanza di .
Dim. Facciamo la dimostrazione nel caso . La dimostrazione nel caso generale è analoga. Gli elementi dello spazio sono le funzioni
equivalentemente
Tra queste funzioni dobbiamo trovare quella che ha minima distanza da . Si tratta quindi di studiare un problema di minimo al variare dei parametri complessi e o, equivalentemente, al variare dei parametri reali , , . Dato che i problemi di minimo che si sono studiati sono quelli di funzioni di variabile reale, conviene studiare il minimo della funzione
Il minimo esiste, come conseguenza del Teorema di Weierstrass, perché la funzione
è continua e tende a per . Per trovarlo, annulliamo le derivate prime9. Si trovano le condizioni
Usando le uguaglianze (2.21), si trova che le tre derivate parziali si annullano solamente quando
ossia, il punto di che meno dista da è . _ Dunque l’interpretazione della serie di Fourier in è la seguente: per ogni si considera il sottospazio di dimensione finita di . Si scrive la serie di Fourier di e si tronca all’indice . Si trova un elemento di che è proprio l’elemento che meglio approssima la funzione nel senso di . Usando una terminologia della geometria elementare, diremo che è la proiezione ortogonale di su . Il Teorema 87 si può riassumere dicendo che la successione delle proiezioni di sui converge ad in . Diciamo infine che l’identità di Parseval vale per ogni :
ossia
Di conseguenza:
Teorema 89 La successione dei coeffcienti di Fourier tende a zero.
L’identità di Parseval ha un’interpretazione importante per le applicazioni, che illustriamo con riferimento alla forma complessa, che scriviamo come:
Interpretiamo la variabile come “posizione” ed come “velocità”. Il primo integrale si interpreta come “energia” per esempio cinetica: la “somma” delle energie associate ad ogni particella del corpo. La “componente” di frequenza , ossia
ha quindi “energia” . Quindi,
Naturalmente, niente vieta che nella rappresentazione di un segnale la componente di frequenza abbia “energia” nulla, ossia che . Le considerazioni precedenti mostrano che l’energia di si ripartisce tra i segnali per cui . La successione si chiama lo spettro del segnale. Infine, notiamo che l’identità di Parseval mostra che se i coeffcienti di Fourier sono tutti nulli allora la funzione è nulla, ed ovviamente vale anche il viceversa. Ossia:
Se accade che le due funzioni e sono continue, allora la condizione (2.28) implica che esse coincidono. In generale, se vale (2.28), le due funzioni possono “considerarsi equivalenti” nel senso che danno il medesimo contributo alle espressioni integrali nelle quali figurano.
Il calcolo dei coeffcienti di Fourier richiede il calcolo di integrali piuttosto noiosi. In certi casi si possono usare dei trucchi che semplificano il calcolo. Per esempio:
Questi integrali si calcolano facilmente per parti ma ciò richiede un calcolo indipendente per ogni valore di . Un modo più veloce è il seguente: si consideri la funzione
Il numero è il valore per della funzione10
(formula valida per ). Calcolando per e dividendo per , si trova
Dunque,
| (2.29) |
Procedendo in modo analogo si verifichi che
allora
Si noti che quella ottenuta non è una serie di Fourier, a causa del primo addendo . Se vogliamo la serie di Fourier di dobbiamo esprimere anche la funzione mediante la sua serie di Fourier, usando (2.29). In questo modo si trova
Il fatto seguente si è già notato: la funzione sia pari,
In questo caso, ciascuna delle funzioni
è dispari e quindi ha integrale nullo: i coeffcienti sono tutti nulli. Ovviamente, vale anche il viceversa se i coeffcienti sono tutti nulli, la somma della serie è una funzione pari. Analogamente, se è dispari,
sono nulli i coeffcienti e viceversa. Dunque:
Teorema 91 Sia
La funzione , periodica di periodo , è pari se e solo se per ogni ; è dispari se e solo per ogni .
Supponiamo ora che sia data una funzione definita solamente su . Ad essa possono associarsi infinite serie di Fourier, una per ciascuna “arbitraria” estensione di a . Tra queste estensioni due sono privilegiate: l’estensione pari e l’estensione dispari. L’estensione pari conduce ad una serie di soli coseni mentre l’estensione dispari conduce ad una serie di soli seni. Dunque:
Teorema 92 Sia . Essa è somma di un’unica serie di Fourier di soli seni, e di un’unica serie di Fourier di soli coseni. La prima definisce l’unica estensione dispari di ad , periodica di periodo ; la seconda definisce l’unica estensione pari di ad , periodica di periodo .
Le formule per la serie di Fourier di di soli seni e di soli coseni si ottengono scrivendo nelle (2.27) le opportune estensioni di . Per esempio, usando l’estensione pari, per si trova
Dato che queste formule (e la corrispondente identità di Parsevale) sono di uso molto comune, vanno ricordate. E’ bene quindi scriverle in modo esplicito:
Sia . Si ha:
con
| (2.30) |
La corrispondente identità di Parseval è
Sia . Si ha:
con
| (2.31) |
La corrispondente identità di Parseval è:
Osservazione 93 Sia , definita su . Vogliamo calcolarne lo sviluppo di Fourier in soli coseni ed in soli seni. Lo sviluppo di Fourier in soli coseni è
Invece, per lo sviluppo di Fourier di soli seni dobbiamo calcolare i coeffcienti usando la formula (2.30). Ricordiamo la formula di Werner seguente:
Si trova:
Dunque,
E’ questa la serie di Fourier dell’estensione per periodicità della funzione seguente, il cui grafico (con ) è riportato in figura 2.9.
Nel piano cartesiano, per e per , sono rappresentati i grafici delle due funzioni decrescenti . Essi, in base alla 3-periodicitè, hanno lo stesso andamento.
| (2.32) |
E’ un fatto che la convergenza nel senso della norma di non implica la convergenza puntuale, nemmeno in un solo punto. Anzi, si prova che esistono funzioni continue e periodiche su la cui serie di Fourier non converge. Esistono però anche casi in cui la serie di Fourier converge puntualmente. Come abbiamo detto questo accade se, per esempio, con . Ci si può chiedere se sia possibile dare condizioni sulla funzione che implichino la convergenza puntuale della serie di Fourier. Condizioni per questo sono note. In particolare si ha:
Teorema 94 Sia ed esistano e tali che per ogni coppia , di punti di valga
| (2.33) |
Sia . La serie di Fourier di converge ad uniformemente in .
Una funzione ovunque derivabile con derivata limitata,
in particolare verifica
e quindi soddisfa alle condizioni del teorema. D’altra parte le ipotesi del teorema 94 implicano la continuità della funzione e questa è una condizione eccessivamente restrittiva per molte applicazioni nelle quali interviene la serie di Fourier. Per cercare di indebolire quest’ipotesi, studiamo cosa accade vicino ad un punto di salto di . Vale: Vale:
Teorema 95 La funzione abbia un salto nel punto . Supponiamo inoltre che esistano e tali che ammetta derivata prima continua sia su che su e che esistano finiti i limiti
In questo caso la serie di Fourier di converge in ogni punto di e inoltre:
Esempio 96 Sia
Si noti che questa funzione differisce dalla funzione per il valore che assume in ; ma il valore assunto in un solo punto non altera gli integrali che definiscono i coeffcienti di Fourier. Dunque le funzioni definite su ed uguali a ed a hanno la medesima serie di Fourier, che è la serie
Per questa serie converge e converge al valore , media dei limiti direzionali di per . Per il teorema 95 la somma della serie è quindi . La convergenza non può essere uniforme perché le somme parziali sono continue mentre la somma della serie non è continua. Se si disegnano alcune somme parziali, come in figura 2.10, si vede che le somme parziali saltano sopra e sotto il valore di una quantità che non si attenua al crescere di . Calcoli piuttosto laboriosi mostrano che
e si può mostrare che è strettamente maggiore di : . E quindi al crescere di l’errore tra e non si attenua (ma si concentra sempre di più intorno al salto ). _
Nel piano cartesiano sono rappresentati il grafico della funzione e i grafici di alcune somme parziali, che oscillano intorno ai valori senza attenuarsi al crescere di .
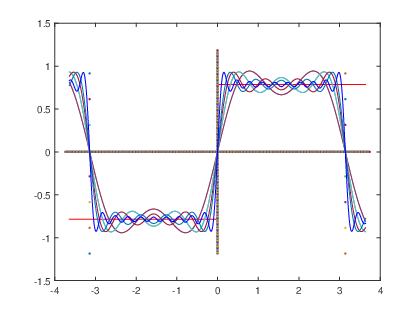
Il fenomeno appena illustrato non dipende dalla particolare funzione usata nell’esempio. Si può provare che, nelle ipotesi del Teorema 95, esso si verifica in vicinanza di ogni salto. Tale fenomeno va sotto il nome di Fenomeno di Gibbs. Infine, riportiamo alcune serie di Fourier di funzioni periodiche di periodo e, nelle figure seguenti, i grafici della restrizione della funzione a , con sovrapposti i grafici di alcune somme parziali. Nella colonna di sinistra della tabella, si riporta l’espressione della funzione su . La funzione è poi estesa ad per periodicità.
(riquadro in alto a sinistra) Nel piano cartesiano, relativamente a , sono riportati il grafico della funzione di salto e il grafico regolare di una somma parziale. Quest'ultimo approssima il grafico della funzione data. Negli altri tre riquadri sono trattate in modo analogo le funzioni
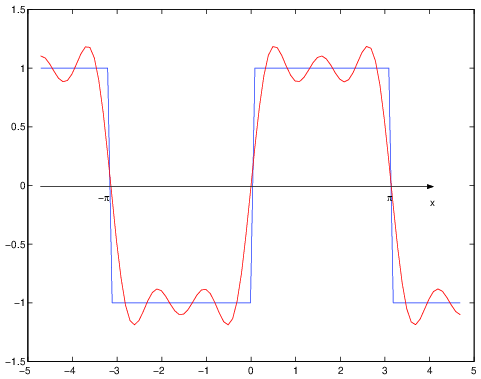
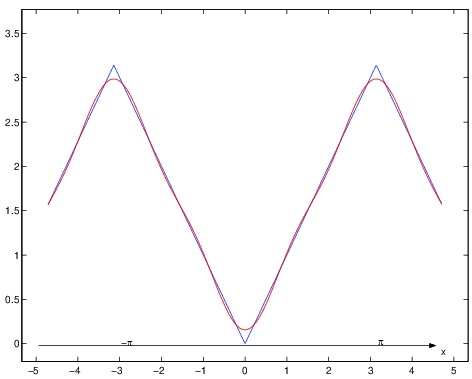
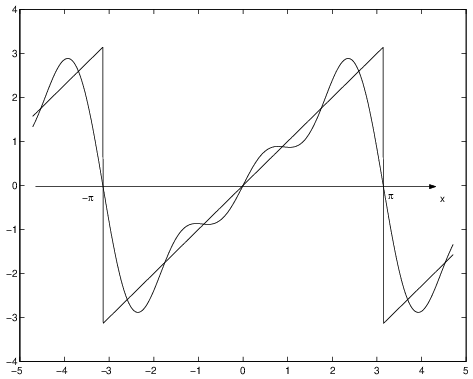
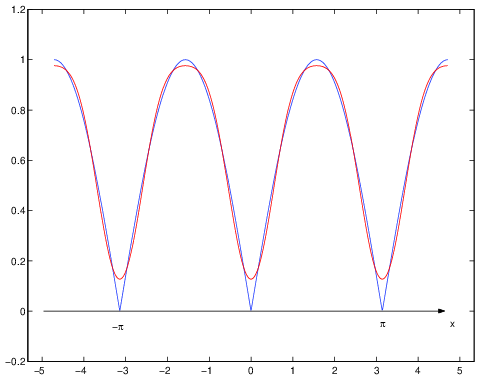
In questo capitolo richiamiamo e precisiamo alcuni concetti che dovrebbero essere noti dai corsi precedenti, in particolare dal corso di Geometria. Tratteremo
I casi su cui insisteremo di più saranno i casi ed .
Non intendiamo qui richiamare la definizione astratta di spazio lineare, vista nei corsi di Geometria. Ci limitiamo a richiamare le sole nozioni necessarie per lo studio di . Gli elementi di sono le -ple ordinate di numeri reali che chiameremo indifferentemente “punti” o “vettori”. E’ bene essere precisi con la notazione. Una di tali -ple si potrà scrivere come una sequenza ordinata di numeri reali , , , scritta in orizzontale o in verticale, ossia come
Noi useremo sempre la rappresentazione in verticale. Però, talvolta sarà conveniente scrivere in orizzontale, con un apice (segno di trasposizione). Ossia intendiamo
Notiamo inoltre che la definizione di è suggerita dalla rappresentazione del piano in coordinate cartesiane. Quando oppure , per indicare il punto useremo anche la notazione dellla geometria analitica, . Gli elementi di , ossia i “vettori”, si indicheranno con una lettera in grassetto:
Ricordiamo che nei corsi di fisica i vettori si indicano con lettere in grassetto oppure con una freccia sovrapposta, ; talvolta con una lettera maiuscola, , oppure con una lettera sottolineata, . I numeri si chiamano le componenti del vettore . Il vettore le cui componenti sono tutte nulle si chiama vettore nullo e si indica col simbolo (da non confondere col simbolo usato per l’elemento nullo di ). In geometria analitica, il punto si chiama anche origine delle coordinate e si indica col simbolo , iniziale di “origine”. Di regola, se indica un vettore, le sue componenti si indicheranno come . Ricordiamo che spesso i vettori si indicano col simbolo , iniziale di “vettore”, ma anche col simbolo , iniziale di “raggio vettore”. Questo per quanto riguarda le notazioni con cui si indicano gli elementi di . Lo spazio però non è solo un isieme di elementi, ma è anche uno spazio vettoriale1. Infatti gli elementi di si possono moltiplicare per numeri reali (che si chiamano anche scalari) e si possono sommare tra loro. Se è un numero reale, per definizione si ha
La somma dei vettori e si ottiene sommando le componenti corrispondenti: , , la loro somma è
Si rinvia ai corsi di Geometria per le proprietà di queste operazioni. Ricordiamo però che se l’operazione di somma appena definita corrisponde alla somma di vettori con la regola del parallelogramma nota dai corsi di fisica. Come terminologia, diremo anche che è ottenuto traslando di il vettore o, in modo equivalente che è ottenuto traslando di il vettore . Si considerino ora vettori , …, di . Il vettore
(con numeri reali) si chiama combinazione lineare dei vettori . L’insieme delle combinazioni lineari si chiama s.spazio lineare generato dai vettori , …, di . Esso contiene sempre , che si ottiene scegliendo nulli tutti gli . Si potrebbe trovare anche con altre scelte degli . Se ciò non accade, i vettori si chiamano linearmente indipendenti Ossia, i vettori sono linearmente indipendenti quando
implica per tutti gli indici . In questo caso l’insieme dei vettori si chiama una base del s.spazio. Se e se i vettori sono linearmente indipendenti, lo spazio da essi generato è e si dice che i vettori sono una base di . Osserviamo che ogni s.spazio lineare è esso stesso uno spazio lineare rispetto alle operazioni di somma e di prodotto per scalari. Come base di si potranno scegliere vettori indipendenti qualsiasi. Scegliendo però i vettori ,
con nella posizione e gli altri elementi tutti nulli, si ha la base canonica.
Esempio 97 Si sa dalla geometria analitica che i s.spazi di sono , e le rette per l’origine. Se invece i s.spazi sono , , le rette per l’origine ed i piani per l’origine. _
Siano ora ed due s.insiemi di . Col simbolo si intende l’insieme
A noi interessa in particolare il caso in cui è un s.spazio mentre ha l’unico elemento . L’insieme in questo caso si indica col simbolo
e si chiama s.spazio affne di , parallelo ad , ottenuto traslando di o anche in . Si noti che:
Come terminologia, in generale chiameremo semplicemente “s.spazi” i s.spazi lineari mentre l’aggettivo “affne” non verrà mai omesso, salvo nei casi particolari seguenti, nei quali useremo i termini “retta” e “piano” propri della geometria:
I parametri , … sono fissati, non tutti nulli. Se è un piano per l’origine ed un punto fissato di , l’insieme si chiama piano per e si vede facilmente che le componenti dei suoi punti verificano
Due vettori non nulli e si dicono colineari quando le componenti corrispondenti sono proporzionali, ossia quando esiste , , tale che
Col linguaggio della geometria analitica, i due vettori e sono colineari quando identificano la medesima retta uscente dall’origine. Consideriamo ora due rette,
| (3.1) |
Le due rette si dicono parallele quando i due vettori e sono colineari. Geometricamente questo significa che un punto della seconda retta si ottiene da un punto della prima retta, traslandolo mediante il vettore , indipendente dai punti e considerati. Due rette non parallele possono avere un punto comune, o meno. Nel secondo caso le rette si dicono sghembe Se le due rette hanno un punto comune, si dicono incidenti Ciò accade quando esistono e tali che
Dunque, le due rette (3.1) sono incidenti se e solo se appartiene al piano generato da e .
Osservazione 98 Sia . Le due rette
coincidono. _
I punti di una retta hanno rappresentazione
| (3.2) |
Il punto si ritrova scegliendo . Per questo, come si è detto, questa retta si chiama “retta per , parallela ad ”. Sia ora un secondo punto di . Chiediamoci se, per qualche selta di , la retta (3.2) contenga ossia, come si dice, “passi anche per ”. Ciò avviene quando per un certo valore del “parametro” si ha
Questo è un insieme di equazioni nelle componenti di . L’uguaglianza si ottiene solo quando è dato da
Il valore può scegliersi arbitrariamente, purché non nullo2. Dunque, scelto , la retta per e si rappresenta come
Il suo s.insieme
si chiama segmento congiungente ed . I punti ed si chiamano gli estremi del segmento. Precisamente, , ottenuto per , si chiama il “primo estremo” ed , ottenuto per , si chiama il “secondo estremo”3. Se , il segmento degenera nel punto :
per ogni . Definiamo ora cosa si intende per “spezzata” di . Questo termine indica un numero finito di segmenti che “si susseguono”; ossia tali che il secondo estremo di uno sia anche primo estremo del successivo; ossia, consideriamo un numero finito di segmenti , , …, . Se accade che per il primo estremo di coincide col secondo estremo di , l’insieme si dice una spezzata. Si dice che una spezzata congiunge i due punti ed quando è il primo estremo di e è il secondo estremo di . Se accade che tali due punti coincidono, la spezzata si dice chiusa. Sia ora un s.insieme di . L’insieme si dice connesso4 quando ogni coppia di punti di può essere congiunta con una spezzata i cui punti appartengono ad . Inoltre, si considerano connessi anche gli insiemi costituiti da un solo punto. Un insieme che è sia aperto che connesso si chiama un dominio Può accadere che l’insieme connesso contenga un punto con questa proprietà: ogni altro punto può essere congiunto ad mediante un segmento contenuto in ; ossia mediante una spezzata costituita da un unico segmento. In tal caso l’insieme si dice stellato rispetto ad . Sia ora un s.insieme di . Si dice che è convesso
Ossia, se a appartengono almeno due punti, allora è convesso quando è stellato rispetto a ciascuno dei suoi punti. La figura 3.1 rappresenta un insieme connesso, a sinistra, ed un insieme convesso, a destra.
[si riportano descrizioni giudicate più significative] Un cerchio è convesso e quindi connesso. Una corona circolare è un esempio di un esempio di insieme connesso ma non convesso. L'insieme costituito dall'unione di due cerchi disgiunti non è connesso.
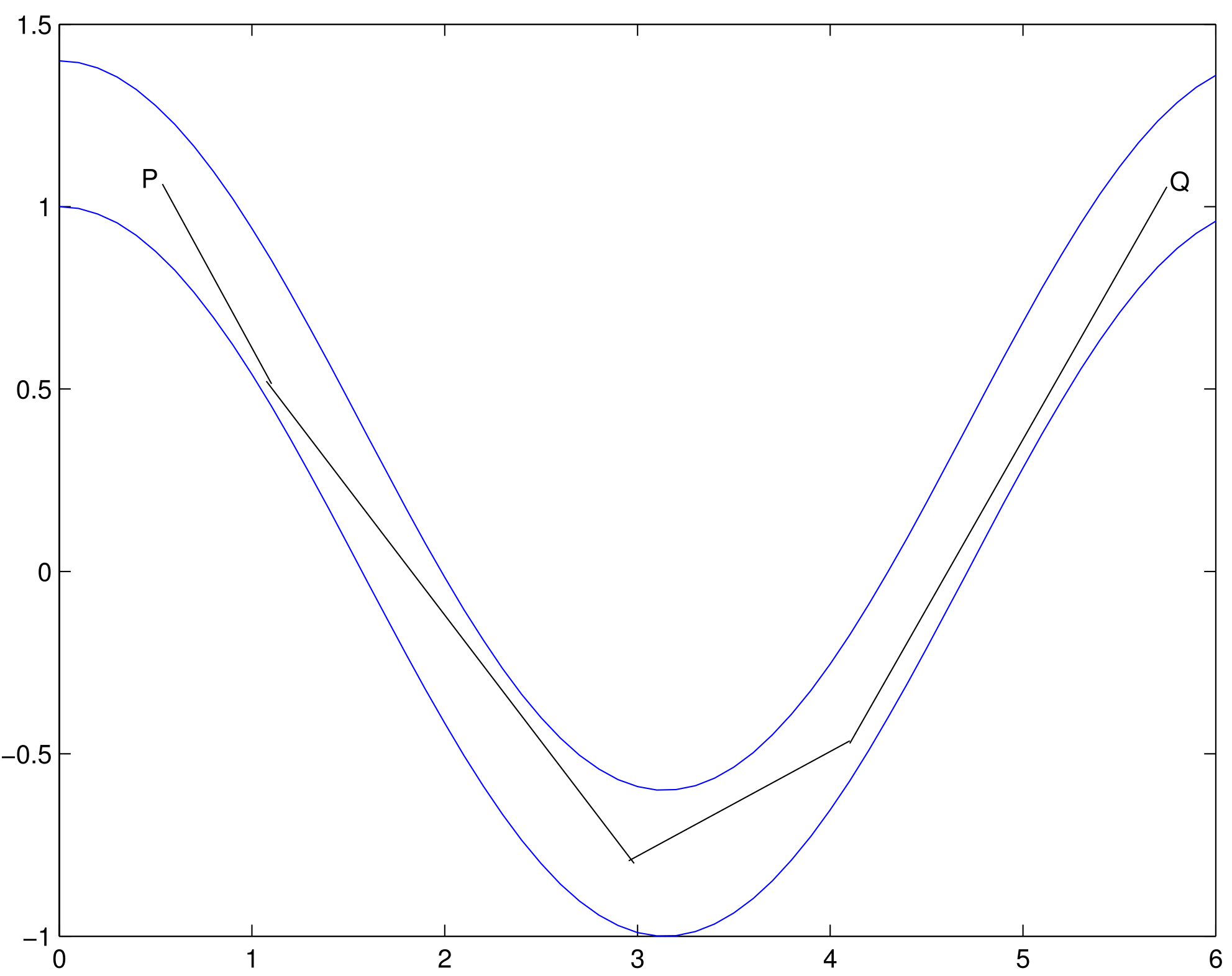
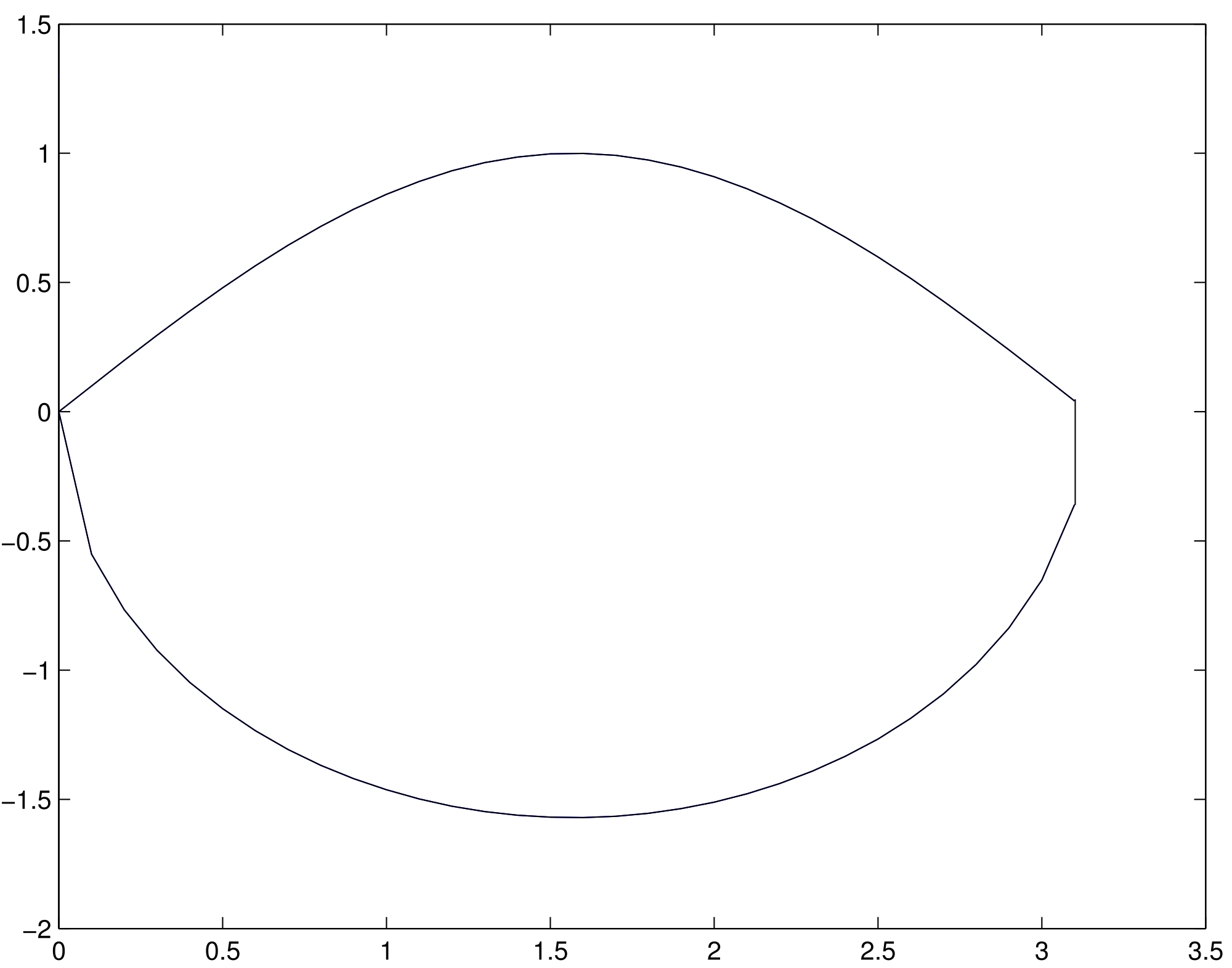
Per le tre definizioni di insieme connesso per archi, stellato e convesso si riducono a quella di intervallo.
L’uso dei vettori è suggerito dalle applicazioni fisiche: un “vettore” può rappresentare, per esempio, una forza o uno spostamento. Domanda ovvia: spostamento da dove, o forza applicata dove? I vettori come -ple ordinate di numeri reali non permettono di rispondere a queste domande. Tali vettori possono usarsi per rappresentare uno “spostamento” nel senso della distanza percorsa, in una certa direzione e in un certo verso, indipendentemente da quale sia il punto di partenza; o una forza di una certa intensità diretta secondo una certa direzione e con un certo verso, indipendentemente da dove essa sia applicata. Per questa ragione, i vettori che abbiamo introdotto si chiamano in fisica vettori liberi Si può decidere di applicare tutti i vettori liberi in un punto convenzionalmente scelto. La scelta naturale è di applicarli nell’origine: i vettori liberi verranno interpretati anche come vettori applicati nell’origine e quindi, per esempio, il vettore rappresenta lo spostamento, in linea retta, da al punto . Se vogliamo rappresentare un vettore applicato dobbiamo dare una coppia di vettori: il primo rappresenta il punto di applicazione e il secondo rappresenta il vettore (forza, spostamento,…) in esso applicato. A noi non serve essere troppo formali a questo proposito, ma è necessario sapere che:
Ricordiamo che una base di è un insieme di vettori linearmente indipendenti. Un insieme non cambia se si cambia l’ordine col quale se ne elencano gli elementi. Se però è un insieme finito e si stabilisce un ordine tra i suoi elementi, si dice che è un insieme ordinato e se è una base di , si dice che è una base ordinata. Per esempio, se si stabilisce di elencare gli elementi della base canonica elencando al –mo posto si ha una base ordinata, ma si ha una base ordinata anche se si stabilisce di elencarne gli elementi a rovescio, oppure prima quelli di indice pari e poi quelli di indice dispari. Quando in si è stabilita una base ordinata si possono fare cose che non sono possibili con basi non ordinate. Per esempio, sia è una trasformazione lineare da in e siano rispettivamente ed due basi ordinate la prima di e la seconda di . La trasformazione si può rappresentare con una matrice come segue. Si considera l’elemento . Questo si rappresenta come
Si costruisce una matrice mettendo il numero nella posizione della prima colonna. La seconda colonna si costruisce in modo analogo a partire da e così via fino a costruire l’-ma colonna. Si costruisce così una matrice che rappresenta la trasformazione lineare . Se la base prescelta è quella canonica e se non si stabilisce diversamente in modo esplicito, si intende che la base canonica è una base ordinata e che gli elementi della base si susseguono nell’ordine dei loro indici:
Si dice che una base ordinata subordina un’orientazione di . Visto che una base di contiene elementi, ci sono modi di elencarli e quindi si potrebbe pensare che in ci siano (almeno) orientazioni diverse. Invece non è così. Consideriamo per questo una base ordinata ed una seconda base ordinata , (che potrebbe essere ottenuta dagli stessi elementi di , ordinati in modo diverso). Si sa dal corso di Geometria che i cambiamenti di base si rappresentano mediante una matrice invertibile. Sia la matrice che trasforma ordinatamente gli elementi di in quelli di . Essendo invertibile, il suo determinante non è zero e quindi delle due l’una:
Se si dice che le due basi e subordinano la medesima orientazione di , altrimenti subordinano orientazioni opposte. Dunque, in si trovano due orientazioni, che si dicono opposte l’una dell’altra.
I punti del piano si mettono in corrispondenza biunivoca con quelli di procedendo come segue: si fissano due rette incidenti (e tra loro diverse) ed del piano ed un’unità di misura per le lunghezze5. Il punto comune alle due rette si chiama origine. Su ciascuna delle due rette si fissa un verso (che si chiama “positivo”). Il segmento della retta ha lunghezza positiva quando un punto che parte da incontra muovendosi nel verso positivo; negativo altrimenti. In tal caso si dice che appartiene al semiasse positivo. La stessa convenzione si usa sulla retta . Si fissa quindi un ordine tra le due rette. La prima si chiama asse delle ascisse o asse e la seconda asse delle ordinate o asse Le due rette si chiamano assi coordinati Le rette del piano parallele agli assi coordinati si chiamano rette coordinate Facendo ciò, si dice che si è definita un’orientazione del piano. Si fa quindi corrispondere l’orientazione del piano con quella di associando il vettore al punto dell’asse delle ascisse a distanza dall’origine e il vettore col punto dell’asse delle ordinate a distanza dall’origine. Sia un punto del piano. Si fanno passare per due rette , parallela all’asse delle ordinate, ed parallela a quella delle ascisse. Sia il punto in cui incontra l’asse delle ascisse e l’intersezione di di con quello delle ordinate. Siano ed le lunghezze, con segno, rispettivamente di e di . Al punto si fa corrispondere il vettore
Viceversa, ad ogni vettore si fa corrispondere un punto del piano. Si noti che perchè ciò abbia senso, va stabilito prima quale asse scegliere come asse delle ascisse, e quale dei due elementi della base considerare per primo. Ossia, la corrispondenza biunivoca che abbiamo costruito è tra il piano, a cui abbiamo imposto un’orientazione, ed , a cui abbiamo imposto un’orientazione. In pratica, si segue questa convenzione:
La figura 3.2 illustra la situazione.
Due rette orientate incidenti e non ortogonali.
Il più delle volte gli assi coordinati si prendono ortogonali tra loro e l’asse delle ascisse si rappresenta orizzontale, col verso positivo verso destra. In tal caso il verso positivo dell’asse delle ordinate punta verso l’alto. La rappresentazione dello spazio è analoga. Senza entrare nei dettagli, consideriamo subito il caso di un sistema cartesiano ortogonale. Si scelgono tre rette tra loro ortogonali che si chiamano rispettivamente delle ascisse o asse , delle ordinate o asse , delle quote o asse Gli assi ed identificano un piano, il piano , a cui l’asse è ortogonale. L’orientazione sul piano si fissa come si è detto sopra. Rimane quindi da scegliere il verso positivo dell’asse . Questo si sceglie in modo che un osservatore in piedi sul piano , appoggiato all’asse e con la testa nel verso positivo veda che il semiasse positivo si riporta sul semiasse positivo ruotandolo dell’angolo minore e in verso antiorario. Consideriamo ora il punto . Ruotando l’asse delle ascisse di un’angolo giro, esso descrive una circonferenza e, se l’orientazione del piano è positiva, raggiunge il punto dopo una rotazione di un angolo retto in verso antiorario. Un insetto che parta da e si muova lungo la circonferenza verso il punto , raggiungendolo dopo la rotazione di , vede il disco alla sua sinistra. E’ questa la prima comparsa della regola d’Ampère per la determinazione dell’orientazione dello spazio. Ogni punto si rappresenta mediante le sue tre coordinate , e . Queste si ottengono facendo passare per tre piani, paralleli ai piani individuati dalle coppie di assi coordinati (che si chiamano piani coordinati). L’ascissa di è la distanza dall’origine dell’intersezione tra l’asse delle ascisse e il piano per paralello agli assi e , presa con segno. L’ordinata e la quota si definiscono in modo analogo. Si chiamano rette coordinate le rette dello spazio parallele agli assi cartesiani. Sia ora un punto (del piano o dello spazio), . Facciamogli corrispondere il vettore che si interpreta come “spostamento” percorso da un punto che partendo dall’origine raggiunge la posizione occupata da . In questo modo, lo spazio si mette in corrispondenza biunivoca con , che si pensa orientato mediante la sua base canonica. Quando si lavora con un sistema di assi cartesiani ortogonali, si usano i simboli sequenti: lavorando sul piano,
Invece lavorando nello spazio
La teoria dei limiti per le funzioni di una variabile dipende in modo essenziale dalle proprietà seguenti del valore assoluto:
Ricordiamo che da queste proprietà segue anche:
Esaminando il corso di Analisi Matematica 1, si vede facilmente che queste sono le uniche proprietà che servono per la teoria dei limiti, eccezion fatta per quei teoremi che richiedono una relazione di ordine, come i teoremi del confronto o delle funzioni monotone. L’osservazione precedente suggerisce di definire norma su una funzione definita su ed a valori reali, con le proprietà che ora descriviamo. Una norma si indica col simbolo . Con questo simbolo, le proprietà sono:
Non è diffcile provare:
Lemma 99 Per ogni , vale
Dim. Esattamente come nel caso dei numeri, si nota che la disuguaglianza da provare equivale alle due disuguaglianze
La seconda disuguaglianza segue dalla disuguaglianza triangolare, scrivendo
L’altra segue in modo analogo, scrivendo
Dunque, definita una norma, è possibile trattare la teoria dei limiti su esattamente come per , provando tutti i medesimi teoremi, con le stesse dimostrazioni, a parte quelli che fanno intervenire la monotonia. Mostriamo che norme su esistono:
Esempio 100 Le seguenti sono norme su :
Si mostri per esercizio che le due funzioni definite sopra effettivamente soddisfano alle proprietà richieste per la definizione di norma. _
Quindi, su possono definirsi almeno due norme diverse. In realtà si possono definire infinite norme diverse. Infatti:
Teorema 101 Sia e sia rappresentato rispetto alla base canonica. Ciascuna delle seguenti è una norma su :
Diciamo subito che la norma di gran lunga più importante è la norma che corrisponde al numero , che si chiama norma euclidea:6
Introdotta una norma si può introdurre la distanza tra i vettori,
e quindi definire:
Definitione 1 Sia un punto di e sia . Si chiama intorno di di raggio , o palla aperta di centro e raggio l’insieme
Dato un insieme di ed un vettore , si dice che:
Dato che le norme su sono infinite, potrebbe sembrare che ci siano infinite teorie dei limiti tra loro diverse. Invece, fortunatamente, le proprietà di avere o non avere limite, il valore dell’evenuale limite e le proprietà dei limiti non dipendono dalla definizione di norma che si decide di usare in . Prima di provare questo fatto, illustriamone la ragione intuitiva consideriamo le tre norme , e in . La figura 3.3 mostra le palle di centro e raggio relative alle tre norme. La palla relativa alla norma euclidea è un disco, in figura rappresentata come un ellisse perché l’unità di misura sui due assi non è la medesima. Le altre due palle sono quadrati (rettangoli in figura, per la ragione detta sopra). Quello con i lati paralleli agli assi coordinati è la palla nella norma . Si vede da questa figura che se una successione tende a zero rispetto ad una di queste norme, entra e rimane definitivamente dentro ciascuna delle tre palle; e quindi tende a zero anche rispetto alle altre norme.
Sono rappresentate le palle di centro 0 e raggio 1 relative alle tre norme . La palla relativa alla norma euclidea è un disco; le altre due palle sono quadrati. Quello con i lati paralleli agli assi coordinati è la palla nella norma .
Il risultato generale è conseguenza delle disuguaglianze seguenti. La prima è ovvia mentre omettiamo la dimostrazione della seconda.
Lemma 102 Sia , una norma di . Valgono le due disuguaglianze seguenti:
In definitiva, per si ha
| (3.3) |
Accettando questo lemma possiamo provare:
Teorema 103 In , una successione converge a in norma se e solo se converge al medesimo limite in qualsiasi altra norma . Si ha se e solo se .
Dim. Proviamo il primo asserto. Sostituendo con si può studiare il caso della convergenza a zero. Proviamo che se e solo se . Questo è immediato dal teorema del confronto per i limiti (di successioni a valori reali) applicato alla disuguaglianza (3.3). Il secondo asserto si prova in modo ovvio. _ Inoltre, sia la successione di numeri reali ottenuta considerando la componente -ma dei vettori . Le disuguaglianze (3.3) mostrano:
Teorema 104 La successione converge se e solo se ciascuna delle successioni di numeri reali è convergente e il vettore ha per i-ma componente il numero .
Osservazione 105 Si noti che un asserto analogo non vale per successioni divergenti ossia tali che
Per questo basta che una delle successioni diverga! _
Si chiama successione fondamentale o successione di Cauchy una successione
con
questa proprietà:
Per ogni
esiste
tale che se ,
allora
Teorema 106 La successione è fondamentale se e solo se ciascuna delle sue componenti è una successione fondamentale di numeri reali.
Si sa dal corso di Analisi Matematica 1 che una successione di numeri converge se e solo se è fondamentale. E quindi quest’asserto vale anche in :
Teorema 107 Una successione di converge se e solo se è fondamentale.
Per dire che in le successioni convergenti sono tutte e sole le successioni fondamentali si dice che è completo Una successione si dice limitata la sua immagine è limitata, ossia quando esiste tale che
Le disuguaglianze (3.3) mostrano che una successione è limitata se e solo se sono limitate le successioni delle sue componenti; e quindi anche in vale il Teorema di Bolzano-Weierstrass:
Teorema 108 (di Bolzano-Weierstrass) Ogni successione limitata ammette s.successioni convergenti.
La norma di gran lunga più utile è la norma , perché essa ha una proprietà ben particolare, che ora illustriamo. Dai corsi di Geometria si sa che è possibile definire il prodotto scalare, detto anche prodotto interno, in e che quando si conoscono le componenti di due vettori rispetto alla base canonica
il prodotto scalare si calcola come7
Si vede quindi che:
| (3.4) |
Osservazione 109 Si osservi che il prodotto scalare di vettori associa a due vettori un numero (e non un vettore)! _
Diciamo infine che un vettore che ha norma euclidea uguale ad si chiama versore I particolari versori , , di (o di se non si considera ) si chiamano i versori degli assi coordinati. Chiamiamo ora ortogonali due vettori che hanno prodotto scalare nullo e mostriamo che vale:
Teorema 110 (Teorema di Pitagora) Se e sono due vettori di , si ha
Dim. Si ricordi dai corsi di geometria che il prodotto scalare gode della proprietà distributiva:
Dunque,
perché ambedue gli addendi in parentesi sono nulli. _
Quando e sono ortogonali, il vettore è l’ipotenusa del triangolo rettangolo di cateti e , si veda la figura 3.4. Dunque Il Teorema di Pitagora si interpetra dicendo che in il quadrato costruito sull’ipotenusa di un triangolo rettangolo ha per area la somma delle aree dei quadrati costruiti sui cateti.
La figura a destra mostra il triangolo rettangolo avente cateti i vettori e ipotenusa il vettore . La figura a sinistra mostra il parallelogramma individuato dai vettori , le due diagonali sono individuate dai vettori .
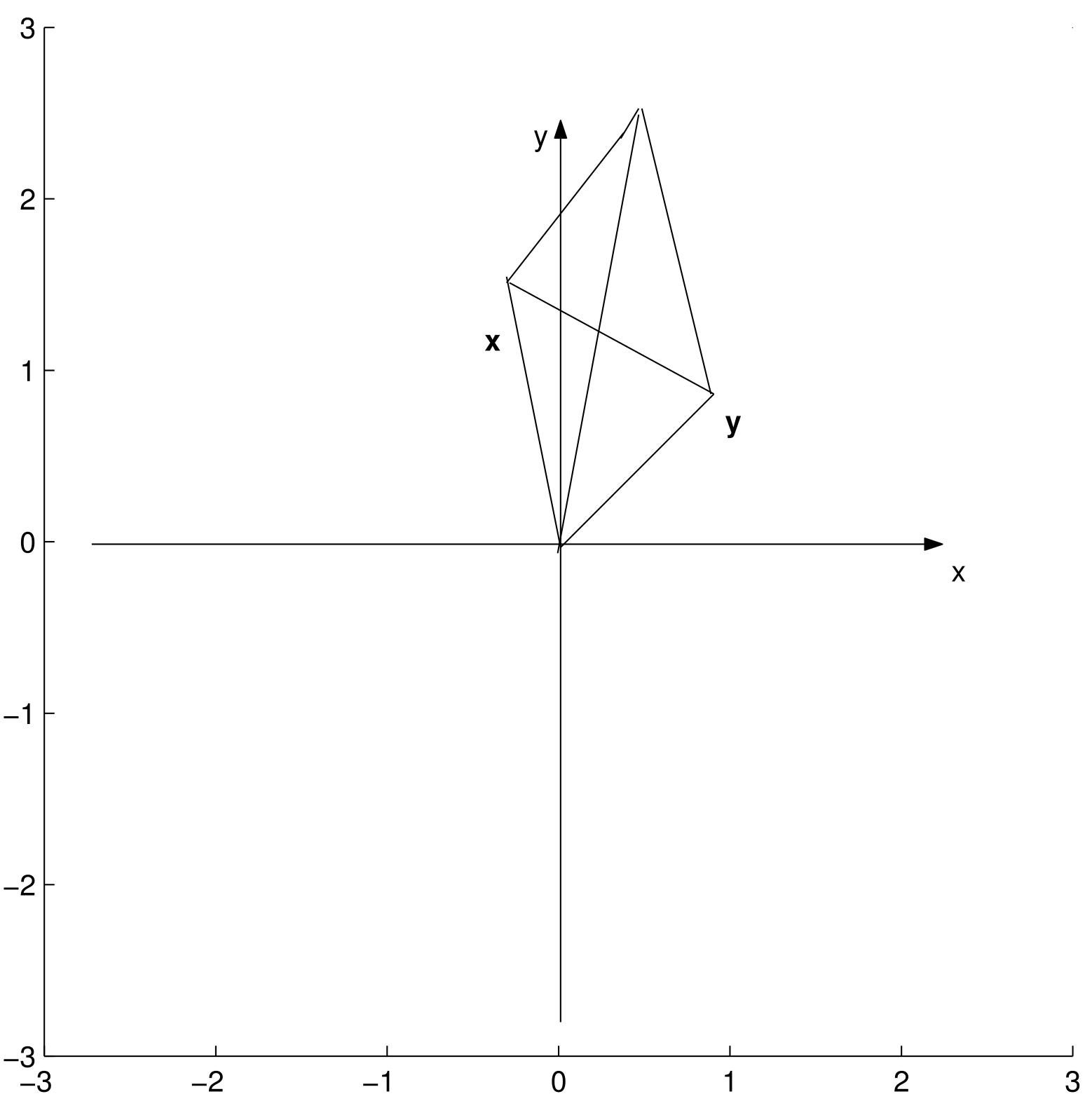
Mostriamo ora una particolarissima proprietà della norma euclidea, che si chiama identità del parallelogramma
Teorema 111 Siano e due vettori di . Vale
Dim. Usando la proprietà distributiva del prodotto scalare, calcoliamo
La norma euclidea è l’unica norma che gode di questa proprietà. Per esercizio, si mostri che la proprietà del parallelogramma non vale per i vettori e di con . La figura 3.4 a destra mostra il significato dell’identità del parallelogramma in : e sono le diagonali del parallelogramma identificato dai due vettori e e quindi l’identità del parallelogramma è un’estensione del teorema di Pitagora: in un parallelogramma, la somma delle aree dei quadrati costruiti sulle due diagonali è uguale alla somma delle aree dei quadrati costruiti sui quattro lati. Il prodotto scalare si definisce tra vettori liberi; la definizione si estende quindi al caso dei vettori applicati nel medesimo punto come si è detto al paragrafo 3.1.2.
Vogliamo ora esaminare più in dettaglio il caso di e di con norma euclidea. Diamo però la definizione seguente che vale anche in , dotato della norma euclidea e quindi del prodotto interno: due vettori e si dicono ortogonali quando hanno prodotto scalare nullo:
Si fissi ora il vettore . Sono ad esso ortogonali i vettori e . Le matrici che trasformano la base canonica rispettivamente nella base e sono rispettivamente
La prima ha determinante negativo mentre la seconda ha determinante positivo. Dunque, la base è orientata positivamente, ossia, come anche si dice, ha orientazione concorde con quella dello spazio. Per questa ragione, se non si specifica esplicitamente il contrario, come vettore ortogonale a sceglieremo . Vediamo ora di chiarire il significato geometrico dei determinanti di matrici e . Siano e due vettori, di componenti rispettivamente e rispetto alla base canonica di . Questi vettori identificano i due punti del piano e . Vogliamo calcolare l’area del parallelogramma in figura 3.5. Si sa che l’area è il prodotto della lunghezza di un lato per l’altezza ad esso relativa. Scegliendo come lato quello identificato dal vettore , vogliamo calcolare
ove è il vettore, applicato in , indicato in figura 3.5.
Sono rappresentati il parallelogramma individuato dai vettori e l'altezza relativa al vettore .
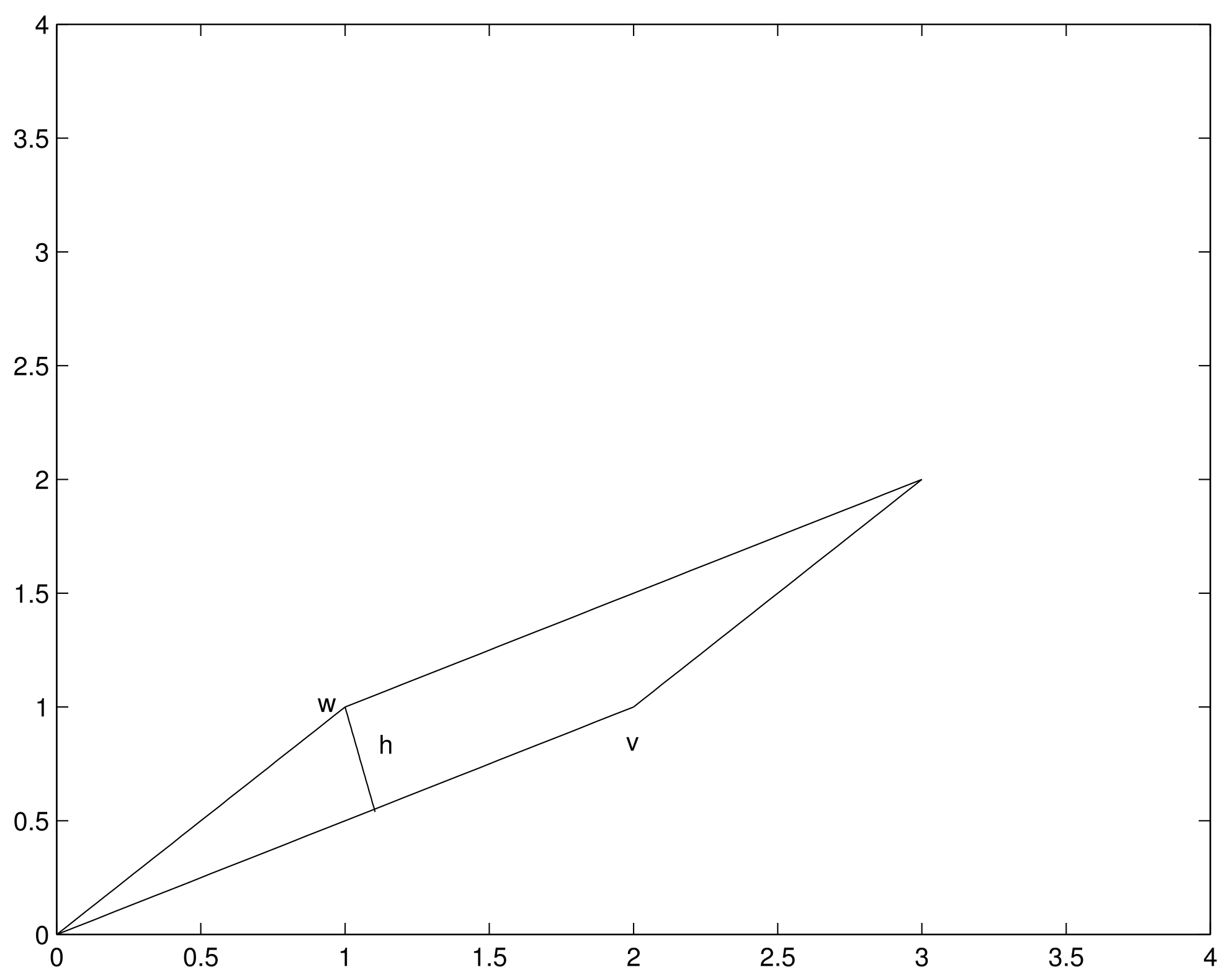
Dividendo per non è restrittivo supporre , ossia . In questo caso l’area è . L’altezza è il vettore
Ricordando che , si calcola:
e quindi l’area è
Si trova quindi un’interpretazione geometrica per il valore assoluto del determinante di una matrice : il numero è l’area del parallelogramma identificato dai due vettori e (applicati nell’origine). Il determinante stesso si interpretra anche come “area con segno” del parallelogramma identificato dai vettori che sono le colonne della matrice. Si può quindi concludere che valgono le affermazioni seguenti, per ogni coppia di vettori , di (in quest’ordine) e per la matrice
| (3.5) |
Risultati del tutto analoghi valgono anche in . Dati tre vettori , e , in quest’ordine, si costruisce la matrice
Il valore assoluto del suo determinante è il volume del parallelepipedo identificato dai tre vettori (applicati nell’origine). La matrice identifica una trasformazione lineare. Tale trasformazione applicata ai punti di un parallelepipedo lo trasforma in un altro, il cui volume differisce da quello del primo per il fattore . Il numero si interpreta come “volume con segno”.
A differenza delle operazioni tra vettori introdotte fino ad ora, che valgono in per ogni , l’operazione di prodotto vettoriale è specifica di . Essa si definisce ponendo:
Completiamo ora la definizione di prodotto vettoriale ponendo
formalmente ottenuta distribuendo le somme sui prodotti e facendo uso delle regole per i prodotti vettoriali degli elementi della base. Di conseguenza, si verificano le regole seguenti:
Quindi, il valore assoluto è il volume del parallelepipedo identificato dai tre vettori (pensati applicati nell’origine);
Questo numero è zero se i vettori e sono colineari. Altrimenti è positivo. Dunque, i tre vettori , , (presi in quest’ordine e con e non colineari) subordinano in l’orientazione positiva.
Si noti che:
Infine, si noti che le regole per il calcolo del prodotto vettoriale sono definite in modo da “mimare” quelle per il calcolo dei determinanti.
Osservazione 112 Il prodotto vettoriale può definirsi in particolare per vettori complanari, per esempio per vettori del piano . In tal caso il prodotto vettoriale è un vettore “verticale”, ossia parallelo all’asse . _
Osservazione sulla notazione La notazione col punto, , per indicare il prodotto scalare è oggi universalmente usata8. Invece, la notazione per il prodotto vettoriale non è cosìuniforme. La notazione si trova principalmente in testi europei, mentre in testi americani (ed anche inglesi) il prodotto vettoriale è indicato .
Il modo più comune per rappresentare i punti del piano, o dello spazio, usa le coordinate cartesiane ortogonali. Però, punti del piano e dello spazio possono rappresentarsi, oltre che in coordinate cartesiane ortogonali mediante coordinate cartesiane oblique o anche con altri “sistemi di coordinate” che generalmente costruiscono corrispondenze biunivoche tra i punti (del piano o dello spazio) (o talvolta di opportuni loro s.insiemi) ed opportuni s.insiemi di oppure di . Per ragioni che vedremo, si parla in tal caso di coordinate curvilinee Noi esamineremo prima le coordinate cartesiane oblique (nel piano. La semplice estensione allo spazio è lasciata al lettore). Poi studieremo alcuni casi particolari di coordinate curvilinee: vedremo l’uso delle coordinate polari e delle coordinate ellittiche per rappresentare i punti del piano cartesiano e l’uso delle coordinate cilindriche, sferiche ed ellittiche per rappresentare i punti dello spazio, che supporremo dotato di un sistema di coordinate cartesiane ortogonali.
Coordinate cartesiane oblique nel piano (e nello spazio). fissata l’origine , tracciamo per essa due rette non coincidenti (tre rette non complanari nello spazio). Queste rette si chiamano assi cartesiani obliqui. Si decida quale è la prima retta, asse delle ascisse, la seconda, asse delle ordinate, un verso positivo su di esse e un’unità di misura (che potrebbe anche essere diversa. Noi assumeremo che sia la medesima). Da un punto facciamo uscire due rette, parallele agli assi delle ordinate e delle ascisse. La retta parallela all’asse delle ordinate interseca l’asse delle ascisse in un punto la cui distanza distanza (con segno) da si chiama l’ascissa di . In modo analogo si definisce l’ordinata di . La coppia ordinata dell’ascissa e dell’ordinata rappresenta univocamente il punto . Si veda la figura 3.6.
La figura a sinistra mostra due rette nel piano incidenti e orientate (ascisse e ordinate), un punto e le rette per parallele ad ascisse e ordinate. Analoga figura illustra tre rette e un punto nello spazio.
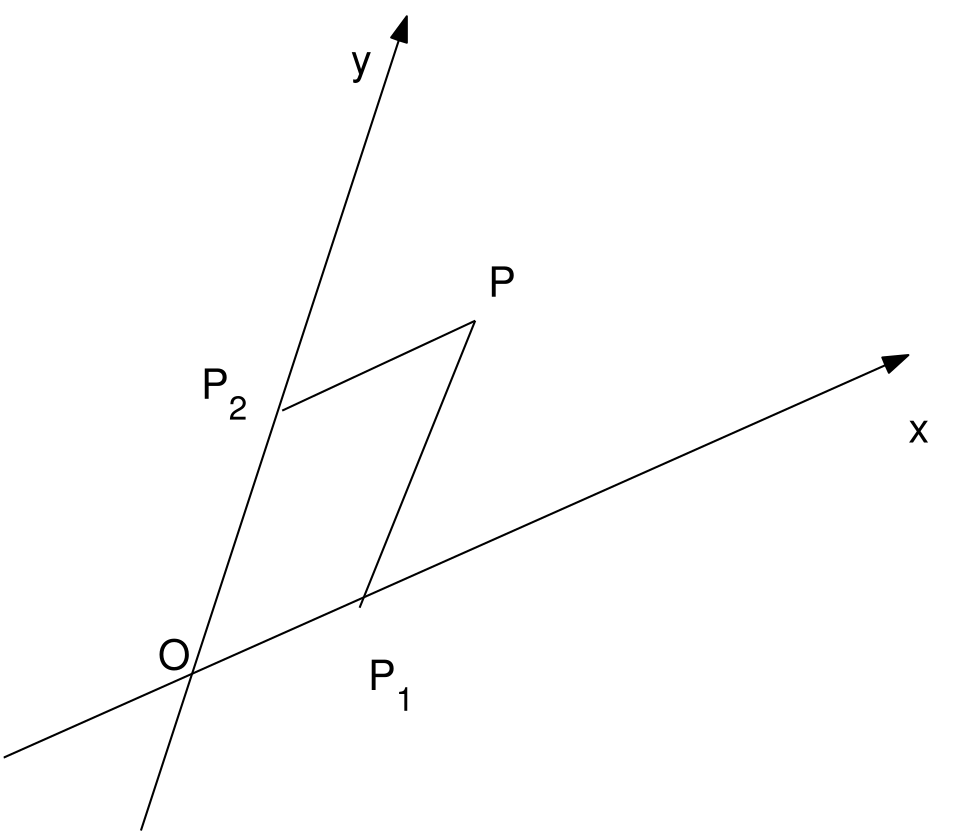
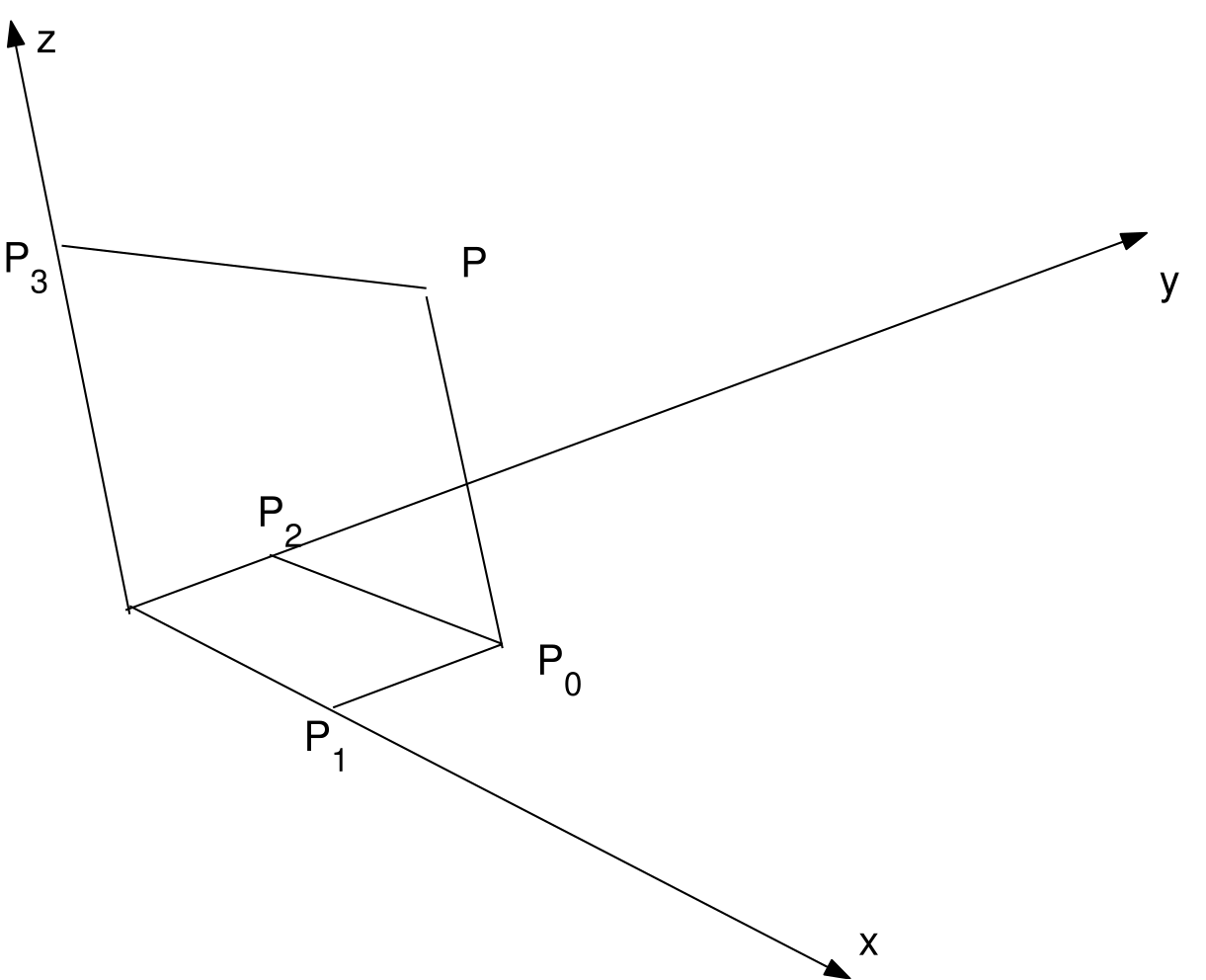
Un problema importante è di passare da un sistema di coordinate ad un altro. Limitiamoci a studiare il caso di due sistemi di coordinate, uno un sistema di coordinate cartesiane ortogonali del piano ed uno un sistema di coordinate oblique. Provvisoriamente indichiamo con lettere greche le coordinate oblique: è l’asse delle ascisse (oblique) ed quello delle ordinate. Indichiamo con e i versori degli assi cartesiani ortogonali e siano
i versori degli assi obliqui, si veda la figura 3.7.
Sono rappresentati nel piano un sistema di assi cartesiani ortogonali , un sistema di assi obliqui aventi la stessa origine e un punto . Sono mostrati gli angoli tra l'asse e l'asse (l'asse , rispettivamente). Le coordinate di nel sistema di assi obliqui sono .
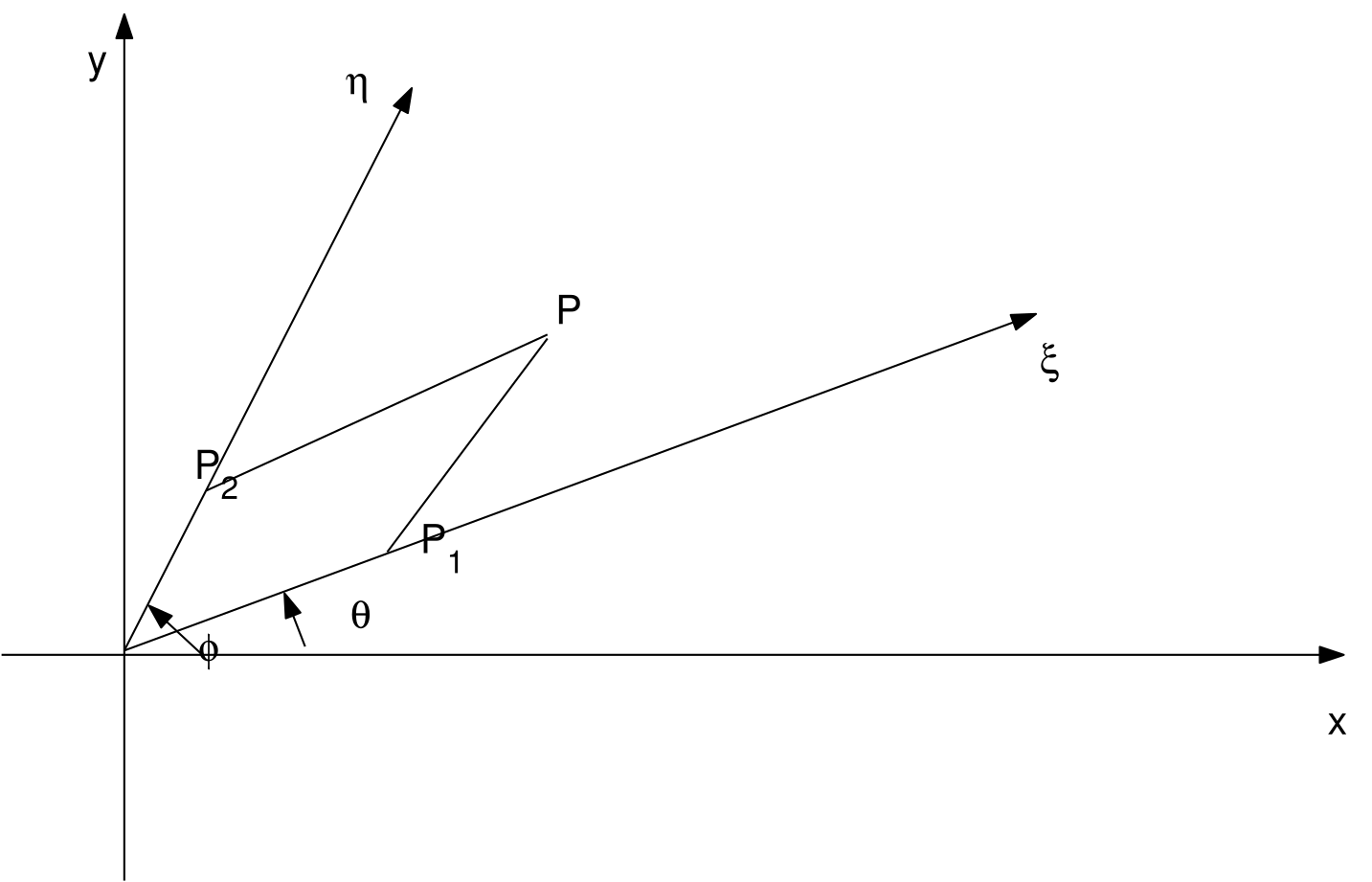
Si conoscano le coordinate cartesiane ortogonali del punto . Le coordinate oblique di sono le distanze dall’origine dei vettori dei punti e , che avranno forma
per certe scelte dei parametri e . Poiché e sono versori, le coordinate oblique di sono proprio i numeri e , che ora vogliamo calcolare. Ciò si fa notando che
Uguagliando le componenti si ottiene immediatamente
Si noti che il denominatore è non nullo perchè gli assi obliqui non coincidono. Si osservi un caso particolare: supponiamo che . In questo caso gli “assi obliqui” sono tra loro perpendicolari e si vuol rappresentare il medesimo punto rispetto a due sistemi di assi cartesiani ortogonali ruotati l’uno rispetto all’altro. Precisamente, il secondo sistema è ottenuto ruotando il primo dell’angolo (in senso positivo o negativo). Essendo in questo caso particolare , le coordinate sono date da
Coordinate polari nel piano. Sia il punto da rappresentare. Si rappresenta mediante la sua distanza da e mediante l’angolo tra la retta che esce dall’origine e punta verso e il semiasse positivo delle ascisse. L’angolo si sceglie col segno in questo modo: si orienta la retta da verso ; si riporta il semiasse sulla semiretta , ruotando dell’angolo minore. L’angolo cosìottenuto si intende positivo se la rotazione è antioraria (si confronti con la regola d’Ampère).
Nel piano cartesiano sono rappresentati un punto , la retta congiungente l'origine con e l'angolo individuato dall'asse delle ascisse e da .
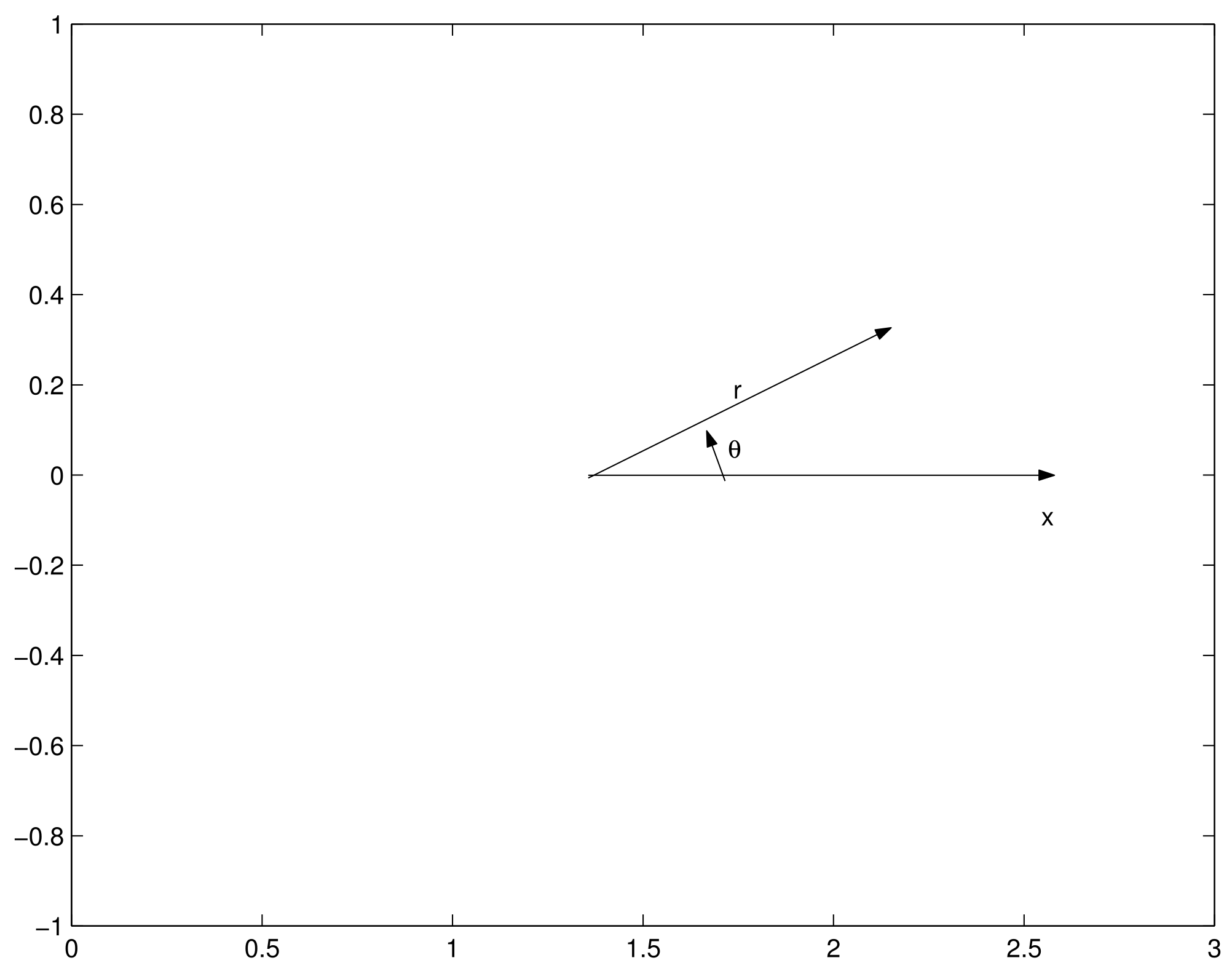
In questo modo si stabilisce una corrispondenza biunivoca tra i punti del piano , escluso , e le coppie di numeri con e . Dunque, ogni punto del piano , escluso , viene identificato dalla coppia dei numeri e , che si chiamano le coordinate polari di . L’origine invece è identificata da per ogni . Si veda la figura 3.8. Il numero si chiama il definmodulo e si chiama l’ argomento}o anomalia}o anomalia di . La relazione tra le coordinate cartesiane e le coordinate polari è data da:
nel contesto delle coordinate polari, il semiasse positivo delle ascisse si chiama anche asse polare e il suo estremo, ossia l’origine, si chiama anche polo
Osservazione 113 Va notato che la corrispondenza è suriettiva ma non iniettiva; dunque non invertibile. Si trova una corrispondenza biunivoca di se .
Coordinate polari ellittiche piano. Siano assegnati due numeri positivi e . Le coordinate polari ellittiche nel piano si ottengono rappresentando i punti mediante i numeri tali che
Le curve coordinate delle coordinate polari od ellittiche. Torniamo alle relazioni
Queste relazioni identificano un punto del piano per ogni scelta di . Si chiamano curve coordinate quelle ottenute da queste espressioni per fissato al variare di (rette per l’origine) e per fissato al variare di (ellissi; nel caso particolare delle coordinate polari si hanno circonferenze).
Coordinate cilindriche nello spazio. Sia un punto dello spazio, riferito ad un sistema di coordinate cartesiane ortogonali. Il punto si chiama la proiezione ortogonale di sul piano . Il punto si può rappresentare mediante le sue coordinate polari e quindi viene ad essere rappresentato mediante . Quando si fa uso di questa rappresentazione si dice che si rappresenta lo spazio in coordinate cilindriche, si veda la figura 3.9. Se invece delle coordinate polari, sul piano si usano le coordinate ellittiche, le corrispondenti coordinate nello spazio si chiamano cilindriche ellittiche
Le superfici coordinate delle coordinate cilindriche. Le curve coordinate sono quelle curve che si ottengono tenendo fissi i valori di due parametri e facendo variare il terzo. Sono quindi rette per l’origine, circonferenze (o ellissi) e rette verticali. Però nello spazio si possono anche definire le superfici coordinate, ottenute tenendo fisso un parametro e facendo variare gli altri due. Quindi, nel caso delle coordinate cilindriche ellittiche, le superfici coordinate sono cilindri ellittici di asse parallelo all’asse (ottenuti tenendo fisso il valore di ); piani per l’asse (ottenuti tenendo fisso il valore di ); piani perpendicolari all’asse (ottenuti tenendo fisso il valore di ).
Un punto nello spazio è individuato mediante le coordinate cilindriche , essendo le coordinate polari della sua proiezione sul piano .
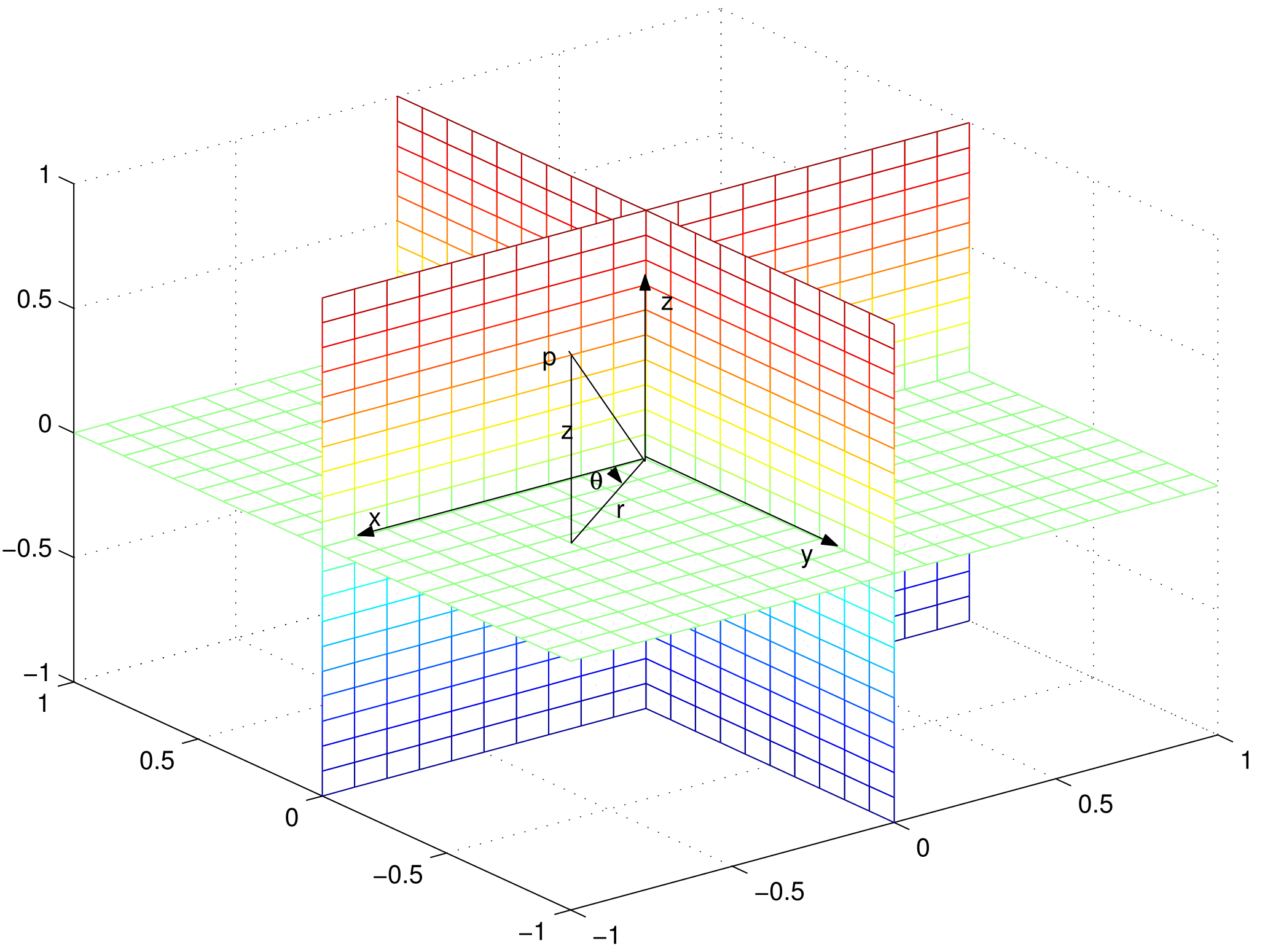
Coordinate sferiche ed ellittiche nello spazio. Le coordinate sferiche nello spazio sono l’analogo delle coordinate polari nel piano. Per rappresentare un punto , si costruisce la retta congiungente con . Si rappresenta mediante dove è la distanza di da e ancora si chiama l’argomento di ; è l’argomento della proiezione di sul piano , è l’angolo tra il versore che sulla retta da a punta verso ed il versore . L’ampiezza di quest’angolo si intende compresa tra e .
Un punto nello spazio è individuato mediante le coordinate sferiche , essendo la distanza di dall'origine, l'argomento della proiezione di sul piano , l'angolo individuato tra la congiungente l'origine con e l'asse z.
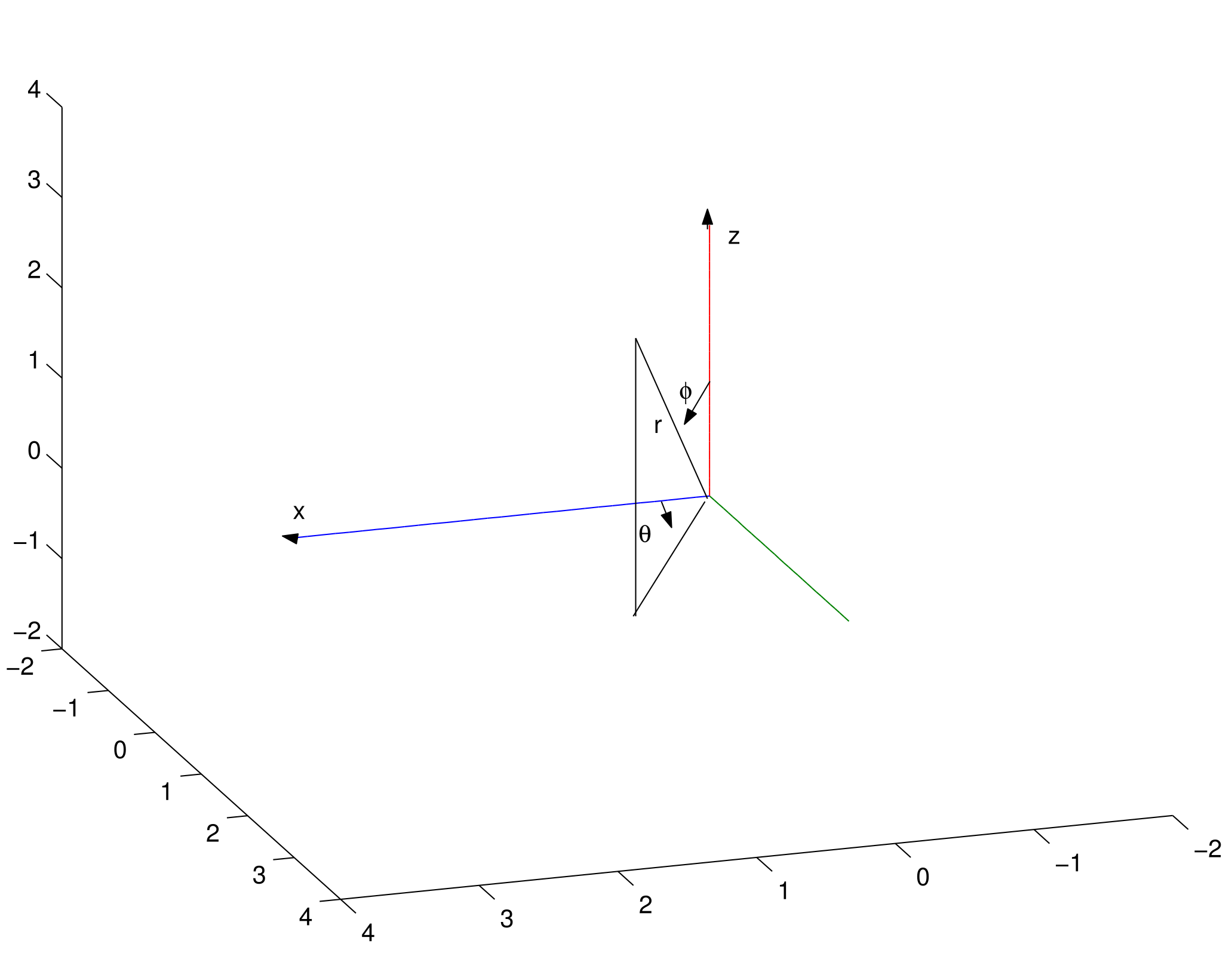
Dunque, si veda la figura 3.10, si rappresenta anche con la terna con
Questi numeri si chiamano le coordinate sferiche di . La relazione tra le coordinate cartesiane e le coordinate sferiche è la seguente:
Il numero si chiama ancora modulo, il numero si chiama longitudine mentre il numero si chiama colatitudine. Siano dati ora tre numeri positivi , e . Le coordinate ellittiche di un punto nello spazio sono le coordinate che si ottengono imponendo
Le superfici coordinate delle coordinate sferiche ed ellittiche. Nel caso delle coordinate sferiche, le superfici coordinate sono sfere di centro l’origine (ottenute tenendo fisso il valore di ); piani per l’asse (ottenuti fissando il valore di ; (semi)coni circolari di asse sull’asse (ottenuti tenendo fisso il valore di ). Per esercizio, se ne identifichino le curve coordinate e si identifichino anche le curve e le superfici coordinate delle coordinate ellittiche.
Studiamo ora le proprietà di limite e continuità delle funzioni definite su sottoinsiemi di ed a valori in . Sia un vettore e siano le sue componenti. E’ utile tener presente le disuguaglianze seguenti (si vedano le (3.3)):
Le funzioni da in sono state studiate nel corso di Analisi Matematica 1. E’ facile adattare gli argomenti visti nel corso di Analisi Matematica 1 al caso di funzioni a valori vettoriali. Per l’uso che a noi servirà, consideriamo funzioni definite su un intervallo , aperto o meno, limitato o meno, a valori in . Dunque, si specifica la funzione assegnando ad ogni valore un vettore , ossia assegnando le sue componenti. Si costruisce cosìuna funzione
Nel caso di o di scriveremo anche
Notiamo che le componenti di sono funzioni da in e quindi le nozioni apprese nel corso di Analisi 1 possono essere applicate a ciascuna componente. Ora definiamo:
Si fissi un punto . Il punto può essere un punto di o anche un estremo di che non gli appartiene.
Si lascia per esercizio di definire i limiti per e per , sulla falsariga della definizione del limite di successioni, vista al paragrafo 3.3. Si noti però che non è possibile definire limiti uguali a . Se non rimane limitata allora possiamo definire solamente e si ricade in un caso già trattato nel corso di Analisi Matematica 1 perch’e la funzione è una funzione da in s’e. Siano le componenti di ed quelle di . Il teorema seguente è analogo al Teorema è.
Teorema 114 Vale se e solo se per ogni vale . Una funzione da in è continua se e solo se ciascuna sua componente è una funzione continua da in .
Noto ciò, è immediato dedurre il risultato seguente:
Teorema 115 Siano e due funzioni da in definite sul medesimo intervallo ed ambedue continue e sia una funzione da in definita su e continua. Le funzioni
(il punto indica il prodotto scalare calcolato per ogni valore di ) sono continue. Se , anche la funzione è continua.
Si lascia per esercizio di enunciare i teoremi corrispondenti per i limiti.
Siano e due funzioni definite sul medesimo intervallo e se ne vogliano studiare le relazioni per . Diciamo che:
In queste definizioni le due funzioni e potrebbero avere valori in spazi di dimensione diversa. In particolare, potrebbe essere una funzione a valori in . Se prende valori in ed è costantemente uguale ad , la condizione vul dire che è un infinitesimo (sottinteso, per ).
Sia punto interno di . Si dice che un vettore è la derivata di quando
La derivata si indica con uno dei soliti simboli,
Se indica il tempo e se indica la posizione di un punto all’istante , allora il quoziente
indica la velocità media del punto, nell’intervallo di tempo ; e quindi la derivata si interpreta come velocità del punto all’istante . Usando le disuguaglianzein (3.3), si vede che
Teorema 116 La funzione è derivabile in se e solo se ciascuna sua componente è derivabile in e inoltre
Dunque, una funzione derivabile in un punto è ivi continua.
In modo del tutto analogo si definiscono le derivate direzionali. Le usuali regole di calcolo delle derivate si possono applicare alle singole componenti del vettore e quindi, per esempio, vale ancora la proprietà di linearità della derivata:
Teorema 117 Siano ed derivabili in . I prodotti scalare e vettoriale9 sono derivabili in e valgono le uguaglianze
Dim. Proviamo l’asserto per il prodotto vettoriale. Bisogna calcolare
Aggiungendo e sottraendo al numeratore si vede che la derivata è uguale a
perchè
perché la funzione , essendo derivabile, è anche continua La dimostrazione per il prodotto scalare è simile. _
Osservazione 118 Nella regola per la derivata del prodotto vettoriale i fattori non possono scambiarsi; invece la derivata del prodotto scalare non dipende dall’ordine dei fattori. _
In particolare:
Teorema 119 Sia una funzione derivabile a valori in e tale che . Allora, .
Dim. Infatti, derivando i due membri dell’uguaglianza
si trova
ossia
Ovviamente, se è derivabile in , vale la prima formula degli incrementi finiti
Osservazione 120 Va esplicitamente notato che la seconda formula degli incrementi finiti, ossia il Teorema di Lagrange, NON vale. Per rendersi conto di ciò, consideriamo la funzione . Il Teorema di Lagrange può applicarsi alle due componenti separatamente, ottenendo
e generalmente . _
Se le singole componenti di sono ciascuna derivabile volte, potremo introdurre le derivate seconde e, in generale, le derivate -me in . Se ciascuna componente ammette derivate in si può anche scrivere la formula di Taylor con resto in forma di Peano,
Se è definita su e ciascuna sua componente è integrabile, si definisce come quel vettore che ha per componenti i numeri .
Studiamo ora le funzioni di più di una variabile; ossia funzioni
a valori in , della variabile , in generale con . Ovviamente, le prime proprietà da studiare saranno le proprietà relative ai limiti ed alla continuità. Come vedremo, non si incontrano situazioni sostanzialmente diverse da quelle delle funzioni da in (però le proprietà relative agli estremi saranno tipiche delle funzioni a valori reali). Differenze profonde si troveranno invece nello studio della differenziabilità.
Ricordiamo che col simbolo intendiamo la norma di , senza esplicitamente indicare la dimensione del vettore. Per esempio,
Se vorremo specificare che la norma è quella di allora scriveremo
Sia una funzione definita su un insieme di , a valori in e sia un punto di accumulazione di .
Si noti che la definizione di limite e quella di continuità sono formalmente analoghe a quelle note per funzioni di una variabile. la differenza importante da tener presente è che ora il simbolo indica una palla aperta di centro . E’ un po’ diversa la definizione dei limiti infiniti o per tendente ad infinito, perché non si definisce il limite “direzionale”. Piuttosto, si definisce
In queste definizioni, per completezza, abbiamo usato gli indici e per indicare esplicitamente gli spazi nei quali le norme vanno lette; da ora in poi però ometteremo tali indici.
Osservazione 121 Una funzione da in è infinitesima (per oppure per ) se e solo se è infinitesima come funzione da in . _
Si rileggano i teoremi sui limiti delle funzioni di una variabile, identificando quelle dimostrazioni che, grazie alle proprietà della norma, si ripetono senza alcuna modifica nel caso delle funzioni di più variabili. Naturalmente non rientrano tra queste quelle dimostrazioni che dipendono dall’ordine tra i numeri reali, come il teorema delle funzioni monotone e le sue conseguenze. Sottolineiamo che in particolare valgono:
In particolare, vale
Notiamo un caso particolare del teorema sulla continuità delle funzioni composte, già usato nel corso di Analisi Matematica 1, trattando le equazioni differenziali:
Teorema 123 Sia un funzione da in , continua su un insieme . Sia una funzione continua della variabile reale , a valori in . La funzione composta è continua su .
Come si è detto, una funzione che ha limite zero (per ) si chiama ancora un infinitesimo (per ); e si può istituire un confronto tra gli infinitesimi, esattamente come nel caso di funzioni di una variabile. Per esempio, il simbolo
significa
Usando il linguaggio degli infinitesimi, possiamo enunciare:
Teorema 124 Si ha
se e solo se la funzione è infinitesima per .
Infine, notiamo che le disuguaglianze (3.3) permettono di provare:
Teorema 125 Siano le componenti della funzione da in . Si ha se e solo se per ogni indice vale , ove sono le componenti del vettore .
Si enunci il risulato analogo per i limiti per . Nonostante che abbiamo insistito sulla completa corrispondenza che intercorre tra definizioni e teoremi in una e più variabili, bisogna sottolineare una importante dissimmetria, che illustriamo con riferimento a funzioni da in . Sia quindi
Da
si vede che è infinitesima se e solo se ambedue le sue componenti lo sono; è continua se e solo se ambedue le sue componenti lo sono; ossia, come asserito dal Teorema 125, limiti e continuità possono studiarsi esaminando separatamente le due componenti dei valori assunti dalla funzione, ossia le due componenti ed di . Ciò non accade nello spazio di partenza; ossia le due componenti ed non possono trattarsi separatamente. Per vedere questo, basta considerare una sola delle componenti di , per esempio la funzione a valori reali . La funzione
| (4.1) |
può essere definita per ogni , e può esistere ; però tale limite è in generale diverso da , come mostra l’esempio seguente:
Può anche accadere che esista
ma che non esista il limite che definisce in (4.1), come mostra l’esempio seguente:
Esempio 127 Sia
Essendo , il teorema di confronto dei limiti mostra che
ma,
esiste soltanto se . _
Infine, ricordiamo che successione è il termine che si usa per designare una funzione definita sui numeri naturali. Una successione a valori in si indicherà col simbolo o, più frequentemente 1. Come nel caso particolare delle successioni a valori reali, le definizioni e i teoremi sui limiti delle successioni sono casi particolari di quelli relativi alle funzioni.
E’ possibile provare l’analogo del Teorema di Bolzano-Weierstrass: ogni successione limitata a valori in ammette sottosuccessioni convergenti. Un insieme si dice compatto, quando ogni successione in ammette sottosuccessioni convergenti a punti di . Si può ancora provare:
Teorema 128 Un insieme è compatto se e solo se è limitato e chiuso.
Grazie a ciò, si prova l’analogo del Teorema di Weierstrass con la medesima dimostrazione vista per funzioni di una variabile. Diremo che:
per ogni ;
Vale:
Teorema 129 Sia una funzione a valori reali definita e continua su un compatto . La funzione ammette in sia punti di minimo che punti di massimo.
Il teorema di esistenza degli zeri, equivalentemente quello dei valori intermedi, richiede, per funzioni di una variabile, di lavorare su intervalli. Gli insiemi aperti e connessi sono gli analoghi degli intervalli aperti, nel senso che per essi vale il teorema seguente:
Teorema 130 Sia un insieme aperto e connesso e sia una funzione a valori reali e continua su . Se e sono due punti di , la funzione assume ogni valore compreso tra e .
Dim. Sia
Se è possibile congiungere e con un segmento contenuto in , si considera la restrizione della funzione a tale segmento. Si trova una funzione di una sola variabile, continua e definita su un intervallo, che assume i valori e . Dunque assume anche il valore intermedio . Nel caso che i due punti si congiungano con una poligonale, ossia, con un numero finito di segmenti, si procede in modo analogo sui singoli segmenti. _ Esistono versioni del teorema precedente anche per funzioni a valori vettoriali. Si veda per esempio il paragrafo 7.5.2.
Per lo studio di queste proprietà, conviene separare lo studio delle funzioni a valori in da quello delle funzioni a valori in con .
Quando la funzione dipende da due variabili, la derivata parziale rispetto ad è la funzione sia di che di definita da
Per indicare questa funzione si usa uno dei simboli
In modo analogo si definisce la derivata parziale rispetto ad e quella rispetto alle ulteriori variabili nel caso che la funzione dipenda da più di due variabili. Si noti esplicitamente che trattando delle equazioni differenziali si è dovuto richiedere però non la sola esistenza delle derivate parziali, ma la loro continuità. In effetti, la sola esistenza delle derivate parziali è un concetto molto debole. Infatti:
Esempio 131 L’esistenza delle derivate parziali in un punto , non implica la continuità della funzione in tale punto, come mostra l’esempio seguente:
Per contrasto, si ricordi che l’esistenza della derivata prima in un punto di una funzione di una sola variabile, implica la continuità in tale punto. Ricordiamo che la dimostrazione di ciò segue dalla prima formula degli incrementi finiti e che praticamente tutte le proprietà delle funzioni derivabili di una variabile seguono dalla prima oppure dalla seconda formula degli incrementi finiti. Dunque, se si vuol sperare di ripetere, per le funzioni di più variabili, una teoria simile a quella delle funzioni di una variabile, dovremo dare condizioni per l’esistenza di una formula analoga alla prima formula degli incrementi finiti: ossia, nel caso di funzioni di due variabili, vorremo condizioni perchè valga la formula seguente
| (4.2) |
Il risultato che vogliamo provare è:
Teorema 132 Sia una funzione di due variabili. Supponiamo che essa ammetta ambedue le derivate parziali in ogni punto di un intorno di e che queste siano continue in tale intorno. Esistono numeri , per i quali vale la formula (4.2), ed è:
La dimostrazione è in appendice. Passando al limite per tendente a zero in (4.2) si vede che . Si ha quindi in particolare:
Corollario 133 Se una funzione ha derivate parziali continue un intorno di , essa è continua in .
Argomenti del tutto analoghi valgono per funzioni di tre o più variabili:
Teorema 134 Una funzione di variabili le cui derivate prime esistono e sono continue su un aperto è continua su e per essa vale
Si chiama differenziale della funzione in la trasformazione che al vettore associa il numero
Una funzione dotata di differenziale si chiama differenziabile. Il vettore
si chiama il gradiente della funzione e si indica col simbolo . Il simbolo si legge “grad”, oppure “del” od anche “nabla”. Usando questo simbolo, la (4.3) si scrive
Si chiama piano tangente al grafico di nel punto il grafico della funzione
Dunque, l’equazione del piano tangente è
Il vettore è ortogonale al piano tangente. Per definizione, si chiama il vettore normale al grafico di nel punto . Si veda la figura 4.2.
Una funzione dotata di derivate parziali prime continue su un aperto si chiama una funzione di classe e si scrive . Si noti che, per noi, il gradiente è un vettore colonna. D’altra parte, il differenziale, come trasformazione da , dotato della base canonica, ad , si rappresenta mediante una matrice , ossia mediante un vettore riga. Il vettore riga che rappresenta il differenziale è il trasposto del gradiente. Diciamo infine che si chiamano punti stazionari di i punti nei quali si annulla il gradiente . Tali punti si chiamano anche punti estremali o punti critici
Dato che la derivata parziale rispetto ad di una funzione si calcolano fissando prima il valore di , e lavorando con la funzione della sola , si hanno immediatamente le regole seguente:
Però nello studio della funzione composta si incontrano casi più complessi: può essere che sia che vengano a dipendere dalla medesima variabile, ossia che si voglia calcolare
In questo caso si ha:
Teorema 135 Sia differenziabile in ogni punto di una regione e sia una funzione derivabile di a valori in . Allora per ogni si ha:
| (4.3) |
Dim. Si fissi un punto in cui si vuol calcolare la derivata, e si ponga , . Si ha:
Notando che
si vede che
Infatti
tende a zero per il Lemma 122 mentre
rimane limitata, come si vede dalla seconda formula degli incrementi finiti applicata sia ad che ad :
Sia ora
L’uguaglianza
mostra che è derivabile per , con
Osservazione 136 Si noti che usando il Lemma 122, si è implicitamente assunto che in un opportuno intorno di la funzione non prenda valore . Si provi per esercizio che questa condizione può rimuoversi. _
Naturalmente, il Teorema 135 si estende al caso di funzioni di variabili e, ricordando il Teorema 134, possiamo enunciare:
Corollario 137 Sia e sia una funzione di a valori in , derivabile. Allora, la funzione composta è derivabile su ed inoltre:
(il simbolo indica il prodotto scalare).
Sia ora , . Applicando il teorema precedente alla variabile , con fissato, e quindi alla variabile , con fissato si trova:
Teorema 138 Sia . Siano , due funzioni definite su e di classe , a valori in . Valgono le uguaglianze
(il punto indica il prodotto scalare di vettori colonna). Questa formula si chiama anche formula della derivazione a catena. Consideriamo ora un caso particolare: sia , . In questo caso, i punti sono punti di una retta nella direzione del vettore , uscente da . La derivata
calcolata per si chiama la derivata secondo il vettore della funzione e si indica col simbolo
Dal Teorema 135 segue che, se è di classe ,
Se è un versore, allora si parla di derivata direzionale nella direzione . E’ facile estendere gli argomenti precedenti a funzioni di tre o più variabili.
Sia una funzione differenziabile a valori reali e sia un punto del suo dominio, che supponiamo aperto. fissiamo un segmento uscente da , dato da
| (4.4) |
Il numero si sceglie piccolo, in modo che il segmento sia contenuto nel dominio della funzione, e è un versore. La derivata in della funzione rappresenta la velocità di variazione dei valori della restrizione di al segmento (4.4). E’
Questo numero rappresenta la componente di lungo e quindi il suo valore assoluto è sempre minore di ; è uguale quando accade che è il versore
In questo caso si ha anche
ossia, la funzione ha massima velocità di crescita nella direzione e verso di ; nel verso opposto essa ha massima velocità di decrescita.
Sia una funzione continua su un rettangolo chiuso . Per ogni fissata coppia di numeri e si può definire il numero
Si trova così una seconda funzione definita su . Vale:
Dim. Si scriva
Vogliamo provare che per ogni esiste tale che se
allora vale
| (4.5) |
| (4.6) |
Studiamo (4.5):
La funzione è continua sul rettangolo limitato e chiuso e quindi è uniformemente continua: per ogni esiste tale che
La condizione
vale in particolare se e se . Dunque,
L’assero segue scegliendo
Studiamo il secondo addendo (4.6). Per fissare le idee sia :
La funzione è continua sul rettangolo limitato e chiuso . Dunque, per il Teorema di Weierstrass, è limitata. Sia . Per la monotonia dell’integrale si ha
Per avere questa differenza minore di basta imporre la condizione . _ Di conseguenza, dal teorema sulla continuità delle funzioni composte, viene ad essere continua anche la funzione
per ogni funzione continua . Scegliendo in particolare costantemente uguale a si trova:
Studiamo ora la derivabilità:
Teorema 141 Il rettangolo chiuso sia interno ad una regione su cui la funzione ammette derivate parziali continue. Si ha:
Dim. La seconda uguaglianza è ovvia perchè il calcolo dell’integrale e quello della derivata parziale rispetto ad si fanno per ogni fissata; e quindi di fatto si lavora con funzioni della sola variabile . Proviamo la prima uguaglianza. Scriviamo
Vogliamo provare che questa differenza tende a zero per . fissiamo e scriviamo la formula della media per la funzione della sola variabiled :
ove dipende sia da che da . E’ però un punto dell’intervallo . La funzione è uniformemente continua su e quindi, dato , esiste tale che
e quindi,
Ciò prova che il limite per tendente a zero è nullo. _ Torniamo ora a considerare la funzione
Essendo questa funzione continua, essa può venir integrata rispetto alla variabile :
Si chiama questo integrale iterato della funzione . Naturalmente, si può anche introdurre un secondo integrale iterato,
e si pone il problema di sapere se i loro valori coincidano o meno. La risposta affermativa si vedrà nel cap. 7.
Ricordiamo che le derivate parziali sono a loro volta funzioni di più variabili, e quindi può accadere che esse siano ulteriormente derivabili. Si possono quindi definire le funzioni
e cosìvia. Quando una funzione ammette tutte le derivate parziali continue fino all’ordine incluso su un aperto , si dice che essa è di classe . La notazione
indica la derivata –ma di rispetto alla variabile , ossia la derivata ottenuta tenendo fisso il valore di e derivando volte rispetto ad . Significato analogo ha il simbolo
Le cose sono più complicate se si vogliono le derivate miste, ossia le derivate ottenute derivando alcune volte rispetto ad e anche rispetto ad perché in generale dovremo tener conto dell’ordine con cui si eseguono le derivate. Per esempio, in generale
Fortunatamente, ciò non avviene nei casi più interessanti per le applicazioni. Vale infatti:
Teorema 142 (di Schwarz) Sia una funzione delle due variabili , di classe un intorno di . Supponiamo che nei punti di esistano le derivate miste ed , e supponiamo che queste siano continue. Allora, per ogni vale
Esaminando la dimostrazione, in appendice, si vede facilmente che il teorema si estende al caso di funzioni di più di due variabili. Grazie a questo teorema, le due derivate miste rispetto ad ed di si indicano semplicemente con i simboli
senza preoccuparsi dell’ordine di derivazione. Il Teorema di Schwarz si estende a funzioni di variabili, ed a qualsiasi ordine di derivazione, come segue:
Corollario 143 Sia . Si derivi la funzione volte rispetto alla prima componente di ; rispetto alla seconda ecc., ma con
La derivata che si ottiene non dipende dall’ordine col quale si eseguono le derivate.
Indicare derivate successive di funzioni di più variabili è alquanto noioso. Un simbolo comodo si ottiene in questo modo. Sia una funzione di . Chiamiamo multiindice un vettore le cui componenti sono numeri interi nulli o positivi. Indichiamo con la lunghezza del multiindice:
Col simbolo intendiamo:
Col simbolo
si intende la derivata di che si ottiene derivando la funzione nell’ordine, prima volte rispetto alla prima variabile, poi volte rispetto alla seconda variabile, ecc. (intendendo che se la corrispondente derivata non si esegue). Il Teorema di Schwarz assicura che se ciascuna derivata di ordine di è continua allora le derivate miste di ordine non dipendono dall’ordine con cui vengono calcolate. Ciò giustifica la notazione , che si usa quando la funzione ammette tutte le derivate di ordine su , e queste sono continue.
Cosìcome nel caso delle funzioni di una variabile, gli argomenti che hanno condotto alla prima formula degli incrementi finiti possono iterarsi se la funzione ammette continue le successive derivate. Senza entrare nei dettagli della dimostrazione (simile a quella del Teorema 132), limitiamoci a dare la formula che si ottiene nel caso delle derivate seconde. Quando la funzione dipende da due variabili, si trova
e
| (4.7) |
Grazie al Teorema di Schwarz, la formula precedente si può scrivere
Questa formula si chiama ancora formula di Taylor arrestata al secondo ordine perché il resto verifica la condizione (4.7). Naturalmente, aggiungendo i termini con le derivate rispetto ad una terza variabile si trova la formula di Taylor in tre variabili e, in generale, in variabili. Si immagina facilmente che le formule divengano via via più complesse, in particolare se la funzione dipende da più di due variabili e si vuole scrivere la formula di Taylor di ordine maggiore di . E’ però possibile scrivere queste formule in modo compatto come segue. Riguardiamo il caso della formula di Taylor di arrestata all’ordine . Si noti che il termine
si può pensare ottenuto come segue:
Consideriamo ora il termine di ordine :
si può ottenere con questa regola mnemonica: si “calcola”
scrivendo
Si “applica” quindi questo alla funzione scrivendo
Questa “regola mnemonica” si estende al caso dell’ordine maggiore di e fornisce l’espressione corretta della formula di Taylor arrestata all’ordine :
In questa formula si intende che
L’estensione di questa formula al caso di funzioni dipendenti da più di due variabili è ovvia.
La formula di Taylor, arrestata al primo ordine, ha già dato un’informazione importante. Infatti, ha condotto a provare che ogni funzione le cui derivate parziali sono ovunque continue è essa stessa continua. Daltra parte, nel caso delle funzioni di una sola variabile, la formula di Taylor si usa per dedurre regole che possono condurre ad identificare i punti di massimo o di minimo. Si può immaginare che anche per funzioni di più variabili si possa fare uno studio analogo. Per renderci conto di ciò, repetiamo la definizione degli estremi:
Definitione 2 Sia una funzione da . Un punto interno al dominio di si dice punto di minimo (relativo) per la funzione se esiste tale che
La figura 4.3 (a sinistra) mostra un punto di minimo.
Quando l’intorno di coincide con , si parla di estremi assoluti o estremi globali E naturalmente a questo caso ci si può ricondurre, sostituendo con tale intorno. Studiamo ora il caso degli estremi relativi di funzioni di due variabili, che sono interni al dominio. Notiamo che se è punto di minimo, allora la funzione della sola variabile ,
ha minimo in ed è punto interno al dominio. Dunque, se è derivabile, essa ha derivata nulla in , per il Teorema di Fermat. Per definizione, . Se è punto di minimo, esso è anche punto di minimo per la funzione
e quindi ; e naturalmente il discorso si ripete se è punto di massimo per . Dunque:
Teorema 144 Se la funzione ammette derivate parziali prime nel punto di minimo (o di massimo) interno al dominio, esse sono ambedue nulle:
Ossia: gli estremi di una funzione vanno ricercati tra i suoi punti stazionari. Naturalmente, un punto stazionario, ossia un punto nel quale si annulla il gradiente della funzione, non è necessariamente un estremo. Una coindizione suffciente per gli estremi si vedrà più avanti. Però, in generale la funzione può avere un comportamente quanto mai vario nei punti nei quali si annulla il gradiente. In particolare definiamo:
Definitione 3 Si dice che è punto di sella se è un punto stazionario e se, inoltre, la funzione cambia segno in ogni intorno . _
La figura 4.3, a destra, illustra un punto di sella. Dunque il piano tangente in un punto di minimo o di massimo o di sella (interno al dominio) è orizzontale e, se la funzione è di classe , può scriversi:
con infinitesima. Per capire se è possibile ripetere, per le funzioni di più variabili, uno studio analogo a quello delle funzioni di una variabile, consideriamo il caso particolare in cui , , , , . In questo caso,
Il teorema della permanenza del segno mostra che per abbastanza piccolo,
e quindi ha, in , un punto di minimo relativo, cosìcome la funzione di confronto . In generale se è di classe e le sue derivate prime sono ambedue nulle in un punto dalla formula di Taylor si ha
e la funzione di confronto ha forma
Le proprietà che il punto ha per le funzioni
sono note dai corsi di geometria, caratterizzate mediante la matrice
Con una dimostrazione del tutto analoga a quella vista sopra in un caso particolare, si prova: Se questa matrice è definita positiva, il punto è di minimo; e tale proprietà è ereditada dalla funzione ; se la matrice è indefinita il punto è di sella, e tale proprietà è ereditata dalla funzione ; se la matrice è definita negativa, il punto è di massimo; e tale proprietà è ereditada dalla funzione . Se invece la matrice è semidefinita positiva oppure semidefinita negativa, NIENTE PUÒ DIRSI SULLA FUNZIONE . Ricordando i criteri introdotti nei corsi di geometria, per lo studio della definitezza delle matrici, si ha:
Questo risultato può estendersi a funzioni di variabili. Introduciamo per questo la matrice hessiana della funzione , :
Vale:
Teorema 145 Siano nulle le derivate parziali prime di in . In tal caso:
Invece, NIENTE PUÒ DIRSI se la matrice hessiana è soltanto semidefinita positiva oppure negativa.
Osservazione 146 E’ possibile dare ulteriori condizioni necessarie che devono essere soddisfatte nei punti di minimo oppure di massimo. Ricordiamo che in un punto di minimo le derivate parziali prime devono essere tutte nulle. Questa condizione necessaria si ottiene facilmente considerando la restrizione della funzione ad una delle rette coordinate passanti per il punto; ossia, considerando la funzione si trova che deve essere . Se esiste la derivata seconda, non può essere negativa, altrimenti la funzione avrebbe in un punto di massimo, invece che di minimo. Dunque, in un punto di minimo si deve avere
In un punto di massimo deve aversi invece
Questa condizione si generalizza immediatamente al caso di funzioni dipendenti da più variabili. Un’ulteriore condizione ancora solamente necessaria ma più precisa è la seguente: In un punto di minimo le derivate parziali prime sono nulle e inoltre la matrice hessiana è definita positiva oppure semidefinita positiva. Infatti, se la matrice hessiana fosse definita negativa si avrebbe un punto di massimo, se fosse indefinita si avrebbe un punto di sella. Analogamente, In un punto di massimo le derivate parziali prime sono nulle e inoltre la matrice hessiana è definita negativa oppure semidefinita negativa. _
Sia una funzione da ad e sia una trasformazione lineare da ad . Si dice che la trasformazione lineare è il differenziale di in se
Ovviamente, la –ma componente è una funzione a valori reali e dalla disuguaglianza
segue
ove è la –ma componente di . Segue che una funzione da in che è differenziabile ha differenziabile, e quindi continua, ciascuna delle sue componenti:
Teorema 147 Se la funzione è differenziabile in , essa è ivi continua.
Viceversa, dalle disuguaglianze (3.3), esiste un per cui
Dunque:
Teorema 148 La funzione è differenziabile in se e solo se ciascuna delle sue componenti lo è.
Ricordiamo che le trasformazioni lineari da ad (che rappresentiamo rispetto alle basi canoniche) si rappresentano mediante matrici. Sia la matrice della trasformazione lineare , differenziale in della funzione . La sua –ma riga rappresenta il differenziale della componente e quindi è il trasposto del gradiente della funzione ; e quindi
La matrice si chiama la matrice jacobiana della funzione , calcolata in . Quando , il suo determinante si chiamo lo jacobiano della trasformazione. Per mezzo della matrice jacobiana, possiamo scrivere
| (4.8) |
Quest’uguaglianza si chiama ancora formula degli incrementi finiti. Ovviamente, lavorando per componenti, si potrà scrivere anche una formula di Taylor per funzioni da in , su cui non indugiamo. Come nel caso delle funzioni a valori in , la sola esistenza delle derivate parziali non implica né la continuità né la differenziabilità; ma la continuità delle derivate parziali in un insieme aperto implica la differenziabilità, su tale insieme, di ciascuna delle componenti e quindi di , ossia:
Teorema 149 Le derivate parziali per , esistano continue in un intorno di . Allora, la funzione è differenziabile e quindi continua in .
Rappresentiamo rispetto alla base canonica e sia una trasformazione lineare di in sé. Col medesimo simbolo indichiamo anche la matrice che rappresenta la trasformazione. Si sa che la trasformazione trasforma un parallelepipedo in un altro e l’area del secondo è uguale all’area del primo moltiplicata per . Consideriamo ora una trasformazione differenziabile da in sé:
fissiamo un punto ed un rettangolo con un vertice in . L’immagine di è
ove indica la matrice jacobiana della trasformazione. Quest’insieme non è un rettangolo. E’ un insieme dalla struttura più complicata, ma approssimato dal parallelogramma
Dal paragrafo 3.5
Asserto analogo vale per le trasformazioni di . Quest’osservazione verrà utilizzata nel paragrafo 7.3.1.
Esempio 150 La figura 4.4 riporta, a sinistra, il rettangolo del piano e a destra la sua immagine mediante la trasformazione
Il parallelogramma a destra è .
Osservazione 151 Si vede dalla formula degli incrementi finiti che la matrice jacobiana ha, nel caso delle funzioni da in , lo stesso ruolo che la derivata ha nel caso . Per questa ragione la matrice jacobiana talvolta si indica anche col simbolo
Per esempio, nel caso e , la matrice jacobiana si trova anche indicata con la notazione
Osservazione 152 (Sulle notazioni) Non esiste una notazione standard per lo jacobiano o per la matrice jacobiana. Nei testi di meccanica del continuo e di scienza delle costruzioni lo jacobiano viene indicato col simbolo , come il gradiente. Si faccia attenzione però che se lo spazio d’arrivo ha dimensione allora =“grad” indica un vettore colonna mentre =“matrice jacobiana” indica un vettore riga2. Si faccia anche attenzione a questo: nei testi di meccanica del continuo si considerano funzioni con e in e . La notazione indica la matrice jacobiana fatta rispetto al vettore , ossia
I testi di meccanica del continuo usano una notazione interessante per le derivate: le derivate si indicano con indici numerici preceduti da virgola. Per esempio, sia
Il simbolo
indica la derivata rispetto ad della componente ; ossia il numero prima della virgola specifica la componente e quello dopo specifica la variabile rispetto a cui si deriva. Questo simbolo si può iterare e per esempio
Usiamo il simbolo per indicare la matrice jacobiana della funzione nel punto . E’ immediatamente evidente che
Supponiamo ora di esprimere come funzione
Vale
Teorema 153 (della derivazione a catena) Sia di classe in una regione di ; sia di classe in una regione , ed a valori in . Sia . Si ha
Il prodotto tra matrici si intende come prodotto righe per colonne.
Omettiamo la dimostrazione.
Nel trattare le funzioni a valori vettoriali, abbiamo sempre specificato “a valori in ”. Si ricordi che è uno spazio di vettori liberi, equivalentemente, applicati nell’origine. In molte applicazioni si devono considerare funzioni che associano ad un punto di un vettore ad dimensioni, applicato nel punto stesso. Ossia si devono studiare trasformazioni che trasformano nella coppia . Trasformazioni di questo tipo si chiamano campi vettoriali. E’ comune usare la lettera per indicare campi vettoriali. Si scrive cioè sottintendendo che questo vettore è applicato in , invece di scrivere la notazione completa, ma pedante, La figura 4.5 illustra il modo con cui usualmente si rappresentano i campi vettoriali: da ciascun punto si fa uscire una freccia che indica direzione e verso del vettore. La lunghezza della freccia è proporzionale al modulo. Quando si lavora con campi vettoriali, i concetti di continuità e di differenziabilità sono concettualmente diversi da quelli incontrati per i vettori liberi, perché non si fanno operazioni tra vettori applicati in punti diversi. Per questo la definizione di continuità di un campo vettoriale si definisce confrontando il vettore , applicato in col vettore PARALLELO a , anch’esso applicato in invece che in .
Fortunatamente, la somma di vettori applicati nel medesimo punto si fa operando per componenti, e queste non mutano per spostamenti per parallelismo. Si ha quindi che un campo vettoriale è continuo se e solo se sono continue le sue componenti. Discorso analogo vale per le derivate. Si fissi ed un vettore libero . Si considerino i vettori
che sono i vettori di una retta parallela a , passante per . Si chiama derivata secondo il vettore il limite
La differenza al numeratore si calcola supponendo di traslare per parallelismo il vettore applicandolo nel punto . Dunque, anche il vettore è applicato in . Se è il versore , tale derivata si chiama anche derivata direzionale. Il teorema di derivazione della funzione composta immediatamente dà:
Teorema 154 Sia un campo vettoriale le cui componenti sono funzioni di classe . Esso ammette derivate direzionali in tutte le direzioni, e vale
| (4.9) |
In questo teorema, il simbolo indica la matrice jacobiana della trasformazione che al vettore libero associa il vettore libero . Il vettore si intende applicato in .
Abbiamo visto che il gradiente di una funzione a valori scalari è il vettore
Per molte applicazioni, conviene considerare questo un vettore applicato nel punto . Dunque il gradiente associa un campo vettoriale ad una funzione a valori scalari. Si noti che
Introduciamo una notazione comoda: sia la base canonica di . Scriviamo in modo formale
Allora il gradiente si ottiene formalmente “moltiplicando” il “vettore” per lo “scalare” , e eseguendo le operazioni di derivazione. Introdotto il simbolo , viene naturale introdurre le operazioni
operando formalmente come se si trattasse di prodotti scalari o vettoriali (e quindi la seconda si definisce solo in ). La prima dà la divergenza del campo vettoriale:
Il risultato della seconda operazione, DEfiNITA SOLO IN , si chiama rotore: il rotore del campo vettoriale
è quindi (sottintendendo le variabili indipendenti) il campo vettoriale
Si noti che, sviluppando formalmente secondo gli elementi della prima riga,
Sia ora una funzione due volte derivabile. Calcoliamo prima il gradiente di e poi la divergenza del gradiente:
Usa definire , che si chiama laplaciano, ponendo
Formalmente si scrive
Si vede facilmente che queste considerazioni valgono per funzioni di qualunque numero di variabili.
Osservazione 155 (Sulle notazioni) Proseguiamo quanto si è detto all’osservazione 152. Facendo intervenire le notazioni dei campi vettoriali, i testi di meccanica del continuo e di scienza delle costruzioni scrivono la prima formula degli incrementi finiti in questo modo. Sia una funzione di tre variabili a valori in . Usando la notazione “con la virgola” introdotta all’osservazione 152, la prima formula degli incrementi finiti è
Invece di scrivere in questo modo, viene scritto:
ove indica un “prodotto scalare formale” tre i due vettori colonna e ,
Si trova quindi un operatore differenziale che si applica al campo vettoriale , applicandolo a ciascuna delle sue componenti:
proprio come si voleva ottenere. _
In quest’appendice mostriamo alcune funzioni di due variabili a valori reali, ed il modo di rappresentarle. Sostanzialmente, ci sono tre modi. Descriviamoli prima di tutto in astratto e poi illustriamoli su opportuni esempi. Sia una funzione. Il modo più ovvio di rappresentarla consiste nel costruirne il grafico, ossia nel costruire l’insieme
Naturalmente questo richiede la costruzione di un modello per esempio di gesso o di plastica. In pratica rappresenteremo il grafico su un foglio, mediante opportune tecniche di disegno, che diano l’illusione della profondità. Inoltre, talvolta conviene rappresentare, invece della superficie, solamente una famiglia di linee sulla superficie. Il secondo metodo consiste nel tagliare il grafico a quota , e quindi nel proiettare l’insieme intersezione sul piano . Si disegna cioè sul piano , l’insieme delle soluzioni dell’equazione
Quest’insieme si chiama insieme di livello In molti casi3 un insieme di livello è una “curva” e quindi si parla di curva di livello Disegnando “numerose” curve di livello si può avere un’informazione sul comportamento della funzione: per esempio, le curve di livello sono più fitte dove il grafico della funzione è più ripido. Il terzo metodo consiste nel colorare il piano colorandolo con colori “freddi”, per esempio blu, dove i valori della funzione sono più piccoli e con colori caldi, per esempio rosso, dove la funzione prende valori maggiori. Molto spesso conviene combinare questi metodi, attribuendo i colori alla superficie o alle sue curve di livello. Vediamo ora un esempio. Consideriamo la funzione seguente, il cui grafico è un paraboloide di rotazione:
La figura 4.6 mostra vari modi di rappresentare il grafico di questa funzione.
La figura 4.7 mostra a sinistra la funzione rappresentata mediante le sue curve di livello (e quindi mediante una rappresentazione sul piano ) ed a destra il grafico (fatto con fili) della medesima funzione, sovrapposto alle curve di livello.
Ciò detto, passiamo ad esaminare alcuni esempi di funzioni.
Funzioni costanti rispetto ad una variabile Può accadere che una funzione sia “costante rispetto ad ”; ossia che valga
per ogni scelta di e di , purché la prenda il medesimo valore a destra ed a sinistra. Vediamo le conseguenze “grafiche” di questa proprietà. La funzione è costante sulle rette verticali del piano , che pertanto sono tutte contenute in insiemi di livello. Per esempio la funzione
| (4.10) |
ha gli insiemi di livello rappresentati nella figura 4.8 a sinistra.
Rette del medesimo colore corrispondono al medesimo livello e quindi gli insiemi di livello in quest’esempio non sono “curve”, ma sono insiemi di (infinite) rette verticali. Dal punto di vista del grafico, il grafico della funzione è unione di rette orizzontali, e quindi tutte parallele tra loro. Il termine superficie verrà introdotto più avanti, ma è un fatto che sono “superfici” i grafici di funzioni (differenziabili). Una superficie che è unione di rette tutte tra loro parallele si chiama cilindro Dunque, i grafici di funzioni costanti rispetto ad una variabile sono cilindri. Il cilindro corrispondente alla funzione in esame è nella figura (4.8), a destra.
Funzioni omogenee Si chiamano funzioni omogenee di grado (non necessariamente intero) quelle funzioni che verificano l’uguaglianza
Se la funzione è costante sulle rette che escono dall’origine, che pertanto appartengono ad insiemi di livello. Un esempio è la funzione
Dato che il denominatore si annulla in , per evitare diffcoltà di tipo numerico, consideriamola nel quadrati , . La figura 4.9, a sinistra, presenta le curve di livello della funzione. Come si è detto, queste sono rette, ma problemi di tipo numerico vicino a (dove si annullano sia il numeratore che il denominatore) provocano le distorsioni visibili in figura. Il valore della funzione varia da retta a retta, ma rimane costante sulle singole rette, come mostra la figura 4.9, a destra. In questa figura abbiamo rappresentato, in verde, anche il piano .
Se la funzione è omogenea di grado allora moltiplicando per sia che , il valore di viene anch’esso moltiplicato per . Dunque, se un punto è sul grafico, anche i punti con sono sul grafico. Al variare di , questi descrivono semirette passanti per l’origine: il grafico è unione di semirette passanti per l’origine. Un insieme unione di rette per un medesimo punto si chiama cono E quindi il grafico di una funzione omogenea di grado è un semicono (con vertice nell’origine). La figura 4.10, a sinistra, illustra la situazione nel caso della funzione
La figura riporta sia il grafico della funzione sia alcune rette che escono dall’origine e che appartengono al grafico. La figura 4.10, a destra, riporta invece il grafico della funzione
omogenea di grado . La figura riporta anche una retta per l’origine e per un punto del grafico che, come si vede, non giace sul grafico.
Simmetrie del grafico, funzioni radiali e superfici di rotazione Il grafico di una funzione di più variabili può avere proprietà di simmetria, che estendono quelle note per le funzioni di una variable. Per esempio, diremo che una funzione è
Come nel caso delle funzioni di una variabile, queste proprietà corrispondono a certe simmetrie del grafico rispetto all’origine. Naturalmente, si possono avere altre possibilità che non si incontrano nel caso di funzioni di una variabile (per esempio, simmetrie rispetto ad una retta per l’origine, magari ad uno degli assi coordinati). A noi ora interessa un caso molto particolare di funzione pari di due variabili, ottenuta a partire da funzioni di una sola variabile. Si consideri la funzione di una sola variabile definita su un intervallo4 e a questa si associ la funzione di due variabili
ossia la funzione
I grafici di queste funzioni hanno una proprietà particolare. Sia
Il numero è la distanza di dall’origine. Qualunque altro punto che dista dall’origine, ossia per cui
appartiene al dominio della funzione ed inoltre,
Dunque il dominio della funzione è una corona circolare di centro l’origine (un disco se , l’esterno di un disco se ed ), e tutte le circonferenze di centro l’origine sono curve di livello della funzione. Questo si interpreta in questo modo: se il dominio della funzione contiene un punto , esso contiene tutta la circonferenza di centro che passa per . Inoltre su tale circonferenza la funzione è costante. Ossia se il punto ruota su una circonferenza di centro il corrispondente punto del grafico ruota su una circonferenza parallela al piano , centrata sull’asse delle quote. Detto in altro modo, ogni piano perpendicolare all’asse delle quote se interseca il grafico della funzione lo interseca lungo una circonferenza (oppure in un solo punto). Una superficie come quella ora descritta si chiama superficie di rotazione. L’intersezione tra un piano e il grafico, se non è vuota, si chiama un parallelo della superficie mentre l’intersezione tra il grafico ed ogni piano passante per l’asse delle quote si chiama meridiano della superficie di rotazione: la superficie di rotazione può anche pensarsi ottenuta ruotando un meridiano intorno all’asse delle quote. Il grafico nella figura 4.11 mostra una superficie di rotazione, con indicati alcuni paralleli ed alcuni meridiani.
Osservazione 156
Funzioni periodiche Una funzione di due variabili, , si dice periodica quando esiste un vettore tale che
per ogni del suo dominio. Un esempio è la funzione
Se
si ha
La figura 4.12 mette a confronto il grafico della funzione , a sinistra, con le sue curve di livello, a destra.
In molte applicazioni si incontrano funzioni della forma
con . In queste applicazioni la variabile si interpreta come “tempo” mentre la variabile indica una posizione nello spazio. Dunque la funzione descrive una configurazione che “si muove” al passare del tempo e ciò suggerisce un linguaggio particolare, che illustriamo con riferimento al caso e oppure . In queste applicazioni, la funzione si chiama onda Potremmo pensare al suo grafico come alla configurazione all’istante di un corpo elastico. Vediamo come si interpetano le due funzioni
con . Consideriamo la funzione . fissiamo un valore . La funzione si può interpretare in due modi diversi: come la funzione rappresentata rispetto ad un sistema di riferimento ottenuto traslando l’origine nella posizione dell’asse . Dunque in dietro, perché . Questo modo di intendere le cose è il più comune nelle applicazioni geometriche. Invece, nelle applicazioni fisiche e nell’analisi si incontra più frequentemente un’interpretazione diversa: si pensa ad ed come a due diverse funzioni rappresentate rispetto al medesimo sistema di riferimento. In tal caso, il grafico della funzione è ottenuto traslando in avanti il grafico di . Se si interpreta come “tempo”, nell’unità di tempo il grafico è andato avanti di una quantità . Dunque, rappresenta la velocità dello spostamente del grafico. Pensando al grafico di come ad un’“onda”, si dice che è la velocità di propagazione dell’onda. Le stesse considerazioni si possono ripetere per la funzione con la sola differenza che ora il grafico si sposta in dietro (grazie al fatto che si è scelto positivo). Le considerazioni precedenti suggeriscono di chiamare la funzione onda progressiva mentre la funzione si chiama onda regressiva (ricordiamo che ). La figura 4.13 riporta i grafici delle funzioni
| (4.11) |
a sinistra sono riportati i grafici delle funzioni nel medesimo sistema di assi cartesiani , per diversi valori di . A destra è stato costruito il grafico della funzione di due variabili , nello spazio riferito agli assi cartesiani . Questo grafico è stato sezionato con i piani , , e , e sono stati disegnati i grafici risultanti da queste sezioni.
Il termine “onda” o “moto ondoso” usato per descrivere la situazione illustrata sopra è particolarmente intuitivo nel caso di funzioni periodiche. La figura 4.14 riporta grafici analoghi a quelli della figura 4.13, ma questa volta con la funzione
| (4.12) |
Si noti che questa funzione è periodica di periodo . Il valore scelto nella figura per il periodo è .
Il caso in cui oppure è particolarmente importante nelle applicazioni. Le “onde” costruite a partire da queste funzioni si dicono onde armoniche e in questo caso si usano notazioni e definizioni peculiari che verranno illustrate al paragrafo 4.7.2. Consideriamo ora la funzione . Questa funzione prende il valore in tutti i punti nei quali
Per ogni si viene cosìa descrivere una retta nei punti della quale l’onda ha il medesimo valore. Ciò suggerisce di dare un nome alla quantità : questa si chiama la fase dell’onda progressiva. Al trascorrere del tempo, si rimane sulla stessa fase se si passa dal punto al punto , ossia se si sposta il punto osservato in avanti con velocità . Per questa ragione, il numero si chiama anche (e più frequentemente) velocità di fase Considerazioni analoghe per le onde regressive si lasciano per esercizio. Si noti che talvolta un’onda viene scritta come
In tal caso, la velocità di fase è . Se oppure si incontra un nuovo concetto, che illustriamo con riferimento a , . Consideriamo le due onde progressive seguenti:
Ci si può chiedere su quali insiemi del piano l’onda ha la medesima fase per ogni fissato valore di . Lavorando con la funzione , fissato , la fase vale nei punti della retta
nel caso della funzione fissato , la fase vale nei punti della circonferenza
Per questa ragione, l’onda si chiama onda piana mentre l’onda si chiama onda sferica
Ricordiamo che si chiama moto armonico il moto di un punto lungo una circonferenza, se questo avviene con velocità angolare costante. I punti di una circonferenza di raggio hanno coordinate
| (4.13) |
Il numero è il tempo necessario a descrivere una volta tutta la circonferenza e quindi
è il periodo del moto mentre il suo reciproco
si chiama frequenza del moto. La frequenza indica quanti giri (o parti di giro) percorre il corpo lungo la circonferenza in un’unità di tempo. Il numero di radianti di cui varia la posizione del corpo nell’unità di tempo è e per questo il coeffciente si chiama velocità angolare Dunque,
Dato che , la (4.13) si può anche scrivere (si confronti con l’osservazione 82 dove però il periodo è 2T)
Questo legame col moto armonico suggerisce di chiamare onde armoniche le onde
(e le analoghe onde regressive, il cui esame si lascia per esercizio). Consideriamo per fissare le idee l’onda progressiva
Il numero si chiama l’ampiezza dell’onda e il numero si chiama la fase Le due onde
(con gli stessi valori di e di ) si dicono sfasate di e questo numero si chiama sfasamento tra le due onde5. Per semplicità di scrittura, poniamo ora . L’onda che si trova all’istante è l’onda
periodica di periodo . Però, i fisici riservano i termini “periodo” e “frequenza” alla variabile tempo. Il numero
si chiama invece lunghezza d’onda Infatti, l’onda prende i medesimi valori nei punti che distano l’uno dall’altro di . Questo può visualizzarsi in questo modo: consideriamo la funzione
chiamiamola6 “onda elementare”. Allora il grafico di si può pensare ottenuto giustapponendo i grafici di per ogni numero intero . La figura 4.15 illustra ciò, usando colori diversi per vedere i grafici che si sono giustapposti.
Il numero di onde elementari che si ripetono nell’unità di spazio è diviso per la lunghezza dell’onda elementare, che è . Il valore
si chiama numero d’onde mentre si chiama numero d’onde angolare Come si è detto, i termini “periodo”, “frequenza” e “freqenza angolare” si riservano alla dipendenza dal tempo dell’onda. Ossia, si riservano alla funzione
con fissato. La terminologia è quella già illustrata nel contesto del moto armonico. Indicando con il periodo, si ha
Il numero , che è la velocità angolare del moto armonico, nello studio delle onde armoniche si chiama frequenza angolare Studiamo infine la velocità di fase, scrivendo
La velocità di fase, ossia la velocità di spostamento dell’onda, è
Le onde si “propagano” nello spazio, al trascorrere del tempo; questa almeno sembra l’informazione che può ricavarsi dalle considerazioni precedenti. Però, in uno stesso mezzo possono propagarsi onde diverse. Consideriamo due onde armoniche con la medesima ampiezza
Se le due onde hanno il medesimo numero d’onde, e la medesima velocità, , allora nel mezzo si vede un’onda di ampiezza doppia,
Altrimenti, si trova la funzione
Usando le formule di prostaferesi si trova la funzione
Supponiamo ora che la velocità di propagazione sia uguale per le due onde, . In questo caso si trova il segnale
Interpretiamo questa formula: quando i due segnali hanno numero d’onde molto simile, e “molto grande”, allora è un numero piccolo relativamente sia a che ad . Tenendo fissa la posizione , al variare del tempo in questa posizione si vede passare l’onda , modulata dal segnale di bassa frequenza . Se l’onda in questione è un’onda sonora, nella posizione si sente un suono di frequenza circa uguale a , ed ampiezza lentamente variabile nel tempo, con legge periodica di “piccola“ frequenza . Si ricordi che la minima frequenza dei suoni udibili dall’orecchio umano è Herz. Se accade che
l’orecchio sente comparire un “terzo suono”, diverso dai due suoni emessi dagli strumenti, ed in generale sgradevole. Questo suono si chiama appunto terzo suono o suono di Tartini Il caso estremo si ha quando le due onde hanno il medesimo numero d’onde e la medesima velocità, ma si propagano in verso opposto, . In tal caso si trova
| (4.14) |
In questo caso niente si propaga: la somma di onde uguali propagantesi in versi opposti genera una configurazione , stazionaria, “modulata” dal segnale sovrapposto . Nonostante che in questo caso niente si propaghi, per conservare la memoria dell’origine di questo fenomeno, si chiama ancora “onda” la funzione (4.14) e, per sottolineare che “niente si propaga”, la chiamiamo onda stazionaria
Consideriamo ora due onde uguali, ossia con la medesima ampiezza, numero d’onde e velocità di propagazione, ma sfasate l’una rispetto all’alta. Ossia consideriamo le due onde
Se queste due onde si propagano nel medesimo mezzo, il segnale propagantesi nel mezzo è
Si ha quindi un segnale di ampiezza . che può essere nulla. In pratica, la differenza di fase è dovuta alla differente lunghezza del cammino percorso dalle due onde; e quindi in realtà varia cambiando posizione, . Se l’onda in questione è un’onda sonora, in un punto fissato si sente un suono uguale a quello descritto da , ma con una diversa intensità. L’intensità varia al variare della posizione d’ascolto e in certe posizioni può annullarsi. Questo fenomeno si chiama interferenza delle due onde.
Una funzione , con , si chiama positivamente omogenea di grado (anche non intero) se
Supponiamo che una funzione omogenea di grado sia di classe per . Derivando rispetto a i due membri e calcolando le derivate per , si trova l’uguaglianza
| (4.15) |
Questa relazione si chiama identità di Eulero e caratterizza le funzioni omogenee e di classe (per ) di grado . Infatti, consideriamo il caso . Derivando la funzione
si trova
Per ipotesi la (4.15) vale per ogni ; in particolare vale nel punto , ossia vale
e quindi
Dunque,
ove è una opportuna costante. Ponendo si trova e quindi
In modo analogo si procede per e quindi si trova che la funzione è omogenea di grado .
Dim. Per semplicità di notazioni, proviamo l’asserto con , . fissiamo i punti ed e consideriamo la funzione di una sola variabile
Si noti che mentre . Scriviamo
Consideriamo la funzione della sola variabile
In quest’espressione, il numero si considera come un parametro il cui valore è fissato. Applichiamo ad essa la seconda formula degli incrementi finiti: esiste tale che
Si noti che si sono usate in questo calcolo solamente proprietà delle funzioni di una variabile e che, per applicare la seconda formula degli incrementi finiti, si è usata l’esistenza della derivata di che, a sua volta, implica la continuità di . Il numero dipende dalla particolare funzione usata e quindi, in definitiva, dipende da . Dato che , si ha . Usando ciò, stimiamo
La condizione e la continuità della derivata prima mostrano che il limite per tendente a zero è nullo. Dunque vale
| (4.16) |
Consideriamo ora la funzione , dipendente dai parametri ed ,
Applicando a questa la seconda formula degli incrementi finiti, si trova tale che
Si noti che il numero dipende dalla particolare funzione con cui si lavora, e quindi dai parametri ed che la identificano. E’ però un numero compreso tra ed . La precedente uguaglianza vale per ogni , in particolare essa vale se come valore di si sceglie :
L’ultima differenza verifica
e quindi tende a zero per tendente a zero, per la continuità di e perchè . Dunque si può scrivere
| (4.17) |
Sommando la (4.16) e la (4.17) si trova la formula cercata. _
Osservazione 157 Si noti che per la dimostrazione è suffciente sapere che la funzione è derivabile ed ha derivate continue in un intorno di . _
La dimostrazione del teorema di Schwarz è importante anche perché fornisce un’ulteriore rappresentazione delle derivate miste. Limitiamoci a provare il teorema assumendo . Mostriamo che, se ed sono continue in un intorno di allora si ha
| (4.18) |
L’uguaglianza implica in particolare che le derivate miste sono uguali. Introduciamo la funzione . Vale:
Dal Teorema di Lagrange si ha
Il numero dipende sia da che da , e verifica
Si usi ora la continuità della derivata , l’esistenza in ogni punto della derivata e di nuovo il Teorema di Lagrange per scrivere
Il punto dipende da e da , quindi in definitiva da e da , , e verifica
Dunque, dal Teorema di confronto per i limiti,
cosìche, per la continuità della derivata seconda mista
Ciò prova la prima uguaglianza in (4.18). Per provare la seconda uguaglianza si introduca la funzione
Si procede in modo analogo a quanto fatto per la funzione e si trova:
e quindi . _
Osservazione 158 Si noto che:
I termini “curva” o “superficie” hanno vari significati, tra loro interdipendenti. E’ comodo conoscere da subito il significato di curva o superficie parametrica: diremo che una curva è definita parametricamente quando è espressa mediante un’equazione
(se la curva è in c’è anche una terza componente, ). Una superficie è definita parametricamente quando è definita mediante una trasformazione da una regione di in ,
Osserviamo che ogni grafico di funzione è una curva, o una superficie, definita parametricamente. Infatti, considerando la funzione della variable , il suo grafico è identificato dalle equazioni
In modo analogo, se la funzione dipende da due variabili ed , il suo grafico è la superficie parametrica
Se accade che una curva è grafico di una funzione oppure , diciamo che è una curva cartesiana In modo analogo si definiscono le superfici cartesiane come quelle superfici che sono grafici di funzioni di due variabili. Chiameremo “curva” anche l’insieme immagine della parametrizzazione. Al Cap. 6 saremo più precisi su questo punto. D’altra parte, si sa che la geometria analitica definisce curve e superfici mediante equazioni: l’equazione definisce una circonferenza di raggio (se ; altrimenti definisce un solo punto). In questo paragrafo vogliamo dare condizioni perché un’equazione definisca una “curva” o una “superficie” in un senso che spegheremo, e vogliamo studiare problemi di massimo e di minimo “vincolati“ a tali curve o superfici.
Sia una funzione definita su una regione ed a valori in e si voglia studiare l’equazione . Gli insiemi
si chiamano insiemi di livello della funzione . Più precisamente, l’insieme si chiama l’insieme di livello . Notiamo esplicitamente che l’insieme di livello è un sottinsieme del dominio della funzione e non del suo grafico. Per esempio se l’insieme di livello si ottiene concettualmente con i tre passi seguenti:
L’insieme può avere la natura più varia, come mostrano gli esempi seguenti, nei quali e :
Esaminiamo più in dettaglio l’esempio 7. Come si è visto, si tratta di una curva parametrica. Se è una soluzione, ossia un punto di , allora anche è soluzione; e quindi l’insieme delle soluzioni non è un grafico di funzione (univoca). E’ però vero che se , tagliando l’insieme delle soluzioni con una striscia
con abbastanza piccolo, si trova il grafico di una funzione . Si veda la figura (5.1), a sinistra.
In questo caso particolare è facile determinare esplictamente la funzione, perché
Se invece , l’insieme
non è grafico di una funzione . E’ però grafico di una funzione . Per contrasto, vediamo l’esempio seguente:
Quest’equazione è soddisfatta dai punti di ambedue le bisettrici e l’intersezione delle bisettrici con un intorno di non è un grafico, né di una funzione né di una funzione , si veda la figura (5.1), a destra.
Si pone quindi questo problema: supponiamo che l’insieme sia non vuoto, e se ne conosca un suo punto . Vogliamo dare condizioni sotto le quali esiste un intorno di tale che sia una curva o una superficie cartesiana. Limitandoci al caso oppure . Se , vogliamo capire se l’equazione
si può “risolvere” rispetto per esempio ad , intendendo come “parametro libero” ottenendo come grafico della funzione l’insieme ; Se , vogliamo capire se l’equazione
si può “risolvere” rispetto per esempio a , intendendo come “parametro libero” ottenendo come grafico della funzione l’insieme . Quando ciò accade, si dice che l’equazione considerata definisce implicitamente la funzione, rispettivamente oppure . Ciò si vedrà nel prossimo paragrafo, nel quale illustreremo anche il caso di un sistema di due equazioni in tre variabili:
Ci si chiede se, in un opportuno intorno di un punto , è possibile risolvere questo sistema rispetto a due “incognite” per esempio e , intendendo come “parametro libero”. Se ciò può farsi diremo che si è definita implicitamente una funzione, che si interpreta come curva ottenuta come intersezione di due superfici.
Ricordiamo il problema: si ha un’equazione (o un sistema di equazioni) di cui si conosce una soluzione: si vuol sapere se l’insieme delle soluzioni è, localmente in un intorno di tale punto, una curva o una superficie cartesiana. Considereremo con qualche dettaglio il caso di equazioni mentre ci limiteremo ad enunciare i risultati in due casi più generali.
Ricordiamo il problema che si vuole studiare: Consideriamo l’equazione Sia una soluzione dell’equazione
| (5.1) |
Vogliamo dare condizioni suffcienti per l’esistenza di un intorno di e di una funzione oppure tali che
oppure
La condizione che stiamo cercando è data dal teorema seguente:
Teorema 159 (della funzione implicita) Teorema della funzione implicita Sia una funzione di classe e sia . Se
esiste un intorno di tale che
è grafico di una funzione , oppure . Più precisamente, se allora l’equazione (5.1) definisce implicitamente una funzione di classe , e vale
Se allora l’equazione (5.1) definisce implicitamente una funzione di classe , e vale
Se ambedue le componenti di sono non nulle, allora l’equazione definisce implicitamente sia una funzione che una funzione .
Presentiamo (una parte della) dimostrazione di questo teorema, fissando l’attenzione sul caso . Il punto è uno dei punti nel quale vale l’uguaglianza (5.1), ossia si ha
| (5.2) |
In tal caso, proviamo Si ha:
Teorema 160 Valga . Sia di classe e sia . Sotto queste condizioni, esistono un intorno di ed un intorno di ed esiste un’unica funzione definita in ed a valori in che ha per grafico l’insieme (5.2) ossia tale che
Questa funzione è di classe e inoltre
| (5.3) |
Dim. Per seguire questa dimostrazione, si guardi la figura 5.2. In questa figura, e il punto è indicato con un asterisco.
Per il teorema della permanenza del segno, vale in un intorno di . Siano un intorno di e un intorno di tali che se , allora . Limitiamoci a considerare le coppie con , . Siano , elementi di tali che
Consideriamo la funzione . Questa funzione è continua e strettamente crescente e . Dunque, , . Il Teorema della permanenza del segno mostra l’esistenza di un intorno di tale che
e, per ogni fissato , la funzione è strettamente crescente. Dunque, per fissato, esiste un unico numero tale che
Ciò prova l’esistenza della funzione . Omettiamo la dimostrazione della regolarità. Accettando il fatto non provato che è derivabile, si derivino i due membri dell’uguaglianza
Si trova, per il Teorema 135,
e quindi
Calcolando per si trova la (5.3) _ La funzione cosìcostruita si dece definita implicitamente dall’equazione (5.1).
Consideriamo ora l’equazione
| (5.4) |
Vogliamo dare condizioni sotto le quali sia possibile considerare due delle tre variabili come “parametri liberi” e risolvere rispetto alla terza, ottenendo quindi per esempio una funzione implicita
che interpretiamo come equazione cartesiana di una superficie. Limitiamoci ad enunciare il teorema che dà una condizione solamente suffciente per l’esistenza della funzione implicita.
Teorema 161 Sia una funzione a valori reali della variabile ( indica l’ultima componente del vettore e pertanto è un numero reale). Supponiamo che la funzione sia di classe e che valga
Esiste un intorno di ed esiste un’unica funzione tale che
La funzione è di classe ed il suo gradiente è (indicando con ,…, le componenti di )
Nel caso particolare la funzione che si trova è
ossia la rappresentazione parametrica di una superficie cartesiana.
Osservazione 162 Il teorema precedente si può applicare ad una qualsiasi delle variabili, purché la derivata parziale relativa sia non nulla; per esempio, si potrà applicare alla prima invece che all’ultima componente. _
Studiamo ora un sistema di due equazioni in tre incognite. Consideriamo prima di tutto un esempio:
Esempio 163 Studiamo il problema
Questo sistema può scriversi come
ossia il sistema ha infinite soluzioni, una per ogni valore di . Diremo che questo sistema definisce implicitamente le due funzioni e o meglio diremo che definisce una funzione della variabile reale , a valori in . _
Consideriamo in generale il sistema delle due equazioni in tre incognite
| (5.5) |
Supponiamo che risolva questo sistema e, fissato , consideriamo la funzione da in
Lo jacobiano di questa trasformazione è
Vale:
Teorema 164 Siano e funzioni di classe e sia
Esiste un intorno di ed una unica funzione di classe
| (5.6) |
da in , tale che
La derivata della funzione è
Omettiamo la dimostrazione. Naturalmente diremo che la funzione (5.6) è definita implicitamente dal sistema di equazioni (5.5).
Il teorema della funzione inversa si può vedere come ulteriore caso del teorema della funzione implicita, nel caso in cui l’equazione da risolvere sia
ma conviene vederlo come studio dei cambiamenti di variabile Cominciamo ad illustrarlo nel caso più semplice . Abbiamo quindi una funzione di una sola variabile definita su un intervallo ed ivi di classe . Se la sua derivata non si annulla, si ha oppure in ogni punto di e quindi è strettamente monotona su . Dunque è invertibile. E’ naturale investigare se l’osservazione precedente possa estendersi al caso di funzioni di più variabili. Lo studio di questo problema conduce al “teorema della funzione inversa”, di cui ora illustriamo l’interesse. Abbiamo visto che talvolta conviene rappresentare i punti di mediante coordinate sferiche oppure, a seconda delle applicazioni, cilindriche. In altri casi si usano coordinate ellittiche che, sul piano, sono date dalle trasformazioni
In generale si ha questa situazione: si hanno due regioni ed di (conviene considerarle in due “copie diverse” di ) e una trasformazione invertibile da con immagine uguale ad . In questo caso i punti di si possono rappresentare, invece che con le loro coordinate cartesiane, con quelle del punto di che univocamente gli corrisponde. Per esempio lavorando con coordinate polari nel piano,
Questa è una trasformazione invertibile dalla striscia alla regione che è il piano privato del semiasse . Per molte applicazione è necessario che la trasformazione sia oltre che invertibile anche differenziabile e con inversa essa stessa differenziabile. In pratica non è diffcile riconoscere che la trasformazione con cui si lavora è differenziabile, e spesso anche riconoscere che è invertibile; è più diffcile calcolare esplicitamente l’inversa e verificare che essa è differenziabile. Fortunatamente il teorema seguente dà una condizione suffciente per l’invertibilità (si noti: solamente locale) e per la differenziabilità della funzione inversa.
Teorema 165 (teorema della funzione inversa) Sia una funzione definita su un aperto ed a valori in , di classe . Sia un punto in cui il determinante jacobiano è diverso da zero:
Sotto tali condizioni esistono un aperto contenente ed un aperto contenente con queste proprietà:
Si noti che, accettando la differenziabilità della funzione inversa, la formula per discende dalla formula di derivazione a catena. Infatti, sia la funzione inversa di e supponiamo di sapere che la funzione è differenziabile. Per la definizione di funzione inversa,
La matrice jacobiana della trasformazione è , la matrice identità. Dunque, dalla formula di derivazione a catena,
ossia
E’ importante notare che il teorema della funzione inversa afferma:
Invece, l’invertibilità su tutta generalmente non vale, come prova il caso delle coordinate polari nel piano. Per esse, lo jacobiano è uguale ad e quindi non nullo per e qualunque ; ma se vogliamo una trasformazione biunivoca dobbiamo imporre a di appartenere ad un intervallo di lunghezza non maggiore di . Il teorema della funzione inversa ha numerose dimostrazioni, tutte interessanti. In appendice mostriamo una dimostrazione nel caso di una trasformazione da in sé, basata sul teorema della funzione implicita.
Ricordiamo che il Teorema della funzione implicita dà una condizione suffciente perchè un insieme di livello sia localmente grafico di una funzione: se è di classe , se esiste tale che e se , allora esiste un intorno di la cui intersezione con l’insieme di livello è grafico di una (unica) funzione
Analogo risultato vale se . In questo caso la funzione è . Si ricordi che questa condizione è solamente suffciente, e non necessaria, come prova l’esempio seguente:
Esempio 166 La funzione definisce implicitamente la funzione . Ma in le sue derivate sono identicamente nulle. _
fissiamo un punto tale che . Chiamiamo curva di livello o curva definita implicitamente l’insieme
Si noti che potrebbero esistere punti nei quali il gradiente si annulla. Noi abbiamo richiesto solamente che . Ovviamente, ogni grafico di funzione è una curva definita implicitamente dall’equazione
Si ricordi che avevamo già notato che gni grafico di funzione è anche curva definita parametricamente. Se , esiste un intorno di tale che è grafico di una funzione. Per esempio di una funzione . E’ quindi possibile definire la tangente in a tale grafico. Per definizione, la chiamiamo tangente alla curva nel punto . La retta tangente è
Essendo identicamente nulla, la sua derivata è zero. La derivata per è
ossia, è ortogonale alla tangente. Per definizione, diremo che il gradiente è ortogonale alla curva. Si ha quindi: Dunque:
Teorema 167 Sia è una curva di livello di una funzione di classe . Il gradiente di in ciascuno dei punti di che non sono punti cretici di , è ortogonale alla curva stessa.
Per concludere, mostriamo che niente può dirsi nei punti nei quali le condizioni del teorema della funzione implicita non valgono. Abbiamo già visto (esempio 166) una funzione che non soddisfa alle condizioni del teorema della funzione implicita, ma che definisce implicitamente una funzione regolare. D’altra parte:
Esempio 168 Consideriamo l’equazione
Le due derivate parziali si annullano in . L’equazione si risolve facilmente, trovando le soluzioni
La figura 5.3 a sinistra mostra che l’insieme di livello non è una curva cartesiana in nessun intorno dell’origine. A destra mostra la superficie (un paraboloide a sella) di cui si considera l’insieme di livello. Consideriamo ora l’equazione
Ancora si annullano le due derivate parziali di in . L’equazione definisce però un’unica funzione,
Questa funzione non è derivabile in . Il suo grafico è nella figura 5.4, a destra mentre a sinistra è rappresentata la funzione di cui si calcola la curva di livello. _
Infine, consideriamo l’esempio seguente
Esempio 169 La funzione che si considera è
| (5.8) |
il cui grafico è riportato nella figura 5.5, a sinistra. A destra si riportano alcune delle sue curve di livello, corrispondenti a varie quote.
Si noti che, per quote basse, la “curva di livello” si spezza in due curve e per quota uguale a si riduce a due punti (i due punti di minimo della funzione). La funzione ha un punto di sella di coordinate (0,0, 1). La curva di livello ha un “punto doppio” in . _
Il teorema della funzione implicita asserisce che se (ed è di classe ) allora in un intorno di la curva di livello
è grafico di una funzione oppure . Si sa già che curva di livello può essere un grafico anche se . L’esempio seguente ribadisce questo fatto.
Esempio 170 La funzione è
e il punto è . E’: . Ciò nonostante, la curva di livello è la parabola perché
La figura 5.6 mostra a sinistra il grafico di e la sua intersezione col piano ; a destra varie curve di livello della funzione.
Cosìcome le curve, anche le superfici possono assegnarsi in modo implicito. Sia una funzione di tre variabili, di classe , e si voglia risolvere l’equazione
Sia un punto che verifica l’equazione. Dal Teorema delle funzioni implicite si sa che se
allora esiste un intorno di ed esiste una funzione per cui
Ossia, localmente l’insieme delle soluzioni è il grafico della funzione . Discorso analogo vale se una delle altre due derivate parziali è non nulla. Di conseguenza, se non si annulla, ogni insieme di livello di è “fatto di tanti pezzi di grafici, e quindi di superfici”. Usa considerare anche un tale insieme una superficie definita però in modo implicito. Si abbiano ora due superfici definite in modo implicito da
I punti che appartengono all’intersezione dei due sostegni risolvono il sistema
| (5.9) |
Sia una soluzione di questo sistema. Se lo jacobiano
non è nullo, si sa (dal Teorema 164) che l’insieme delle soluzioni di (5.9) che appartiene ad un opportuno intorno di ha forma
e quindi è una curva cartesiana di ; ossia, localmente l’insieme delle soluzioni di (5.9) è una curva. Chiameremo ancora curva l’insieme di tali soluzioni e, più precisamente, diremo che si tratta di una curva ottenuta come intersezione di due superfici. La figura 5.7 illustra l’intersezione dei due cilindri e .
Diremo che un punto , rispettivamente o di o di , è un massimo relativo, oppure un minimo relativo, di vincolato a o a quando è un massimo o un minimo della restrizione di alla curva o, rispettivamente, alla superficie . In questo capitolo vogliamo dare condizioni necessarie per gli estremi vincolati, che estendano la condizione “derivata prima nulla nei punti estremi”.
Osservazione 171 Daremo condizioni solamente necessarieche devono venir soddisfatte da un punto di massimo o di minimo vincolato ad una curva o ad una superficie , definite implicitamente come curve, rispettivamente superficie, di livello di una funzione di classe . Quindi interessa solamente considerare il comportamento di e di in un intorno di . Dunque, non sarà necessario assumere che il gradiente di sia ovunque diverso da zero. Basterà assumere che sia . Per continuità, il gradiente sarà diverso da zero in un intorno di . _
Esamineremo con qualche dettaglio il caso degli estremi vincolati ad una curva piana e, per sommi capi, il caso degli estremi vincolati ad una superficie ed ad una curva dello spazio.
Considerando ancora il caso di funzioni di due variabili, vogliamo studiare gli estremi di una funzione vincolati ad una curva ; ossia, considerando i punti di minimo1, vogliamo studiare quei punti del sostegno di con questa proprietà: esiste un intorno di tale che se appartiene anche al sostegno di allora si ha
Ovviamente, un caso è banale: se la curva è descritta parametricamente,
il problema si riduce a studiare i punti di minimo relativo della funzione di una sola variabile . Il caso interessante è il caso in cui la curva è descritta in modo implicito. Il problema di caratterizzare i punti di minimo ha carattere locale e, come si è detto, nell’intorno di un punto nel quale il gradiente non si annulla, ogni curva di livello può scriversi in forma parametrica. Però, in pratica, trovarne l’espressione parametrica è tutt’altro che facile. Vogliamo quindi dare una condizione necessaria soddisfatta dai punti di minimo, senza dover esplicitare la curva di livello. Ricapitolando, è data una una funzione di classe e un punto . Assumiamo
E’ data una funzione di classe e supponiamo che sia punto di minimo della vincolato alla curva di livello
Una condizione necessaria che deve essere soddisfatta è data dal teorema seguente.
Teorema 172 Siano e funzioni di classe su una regione e sia un punto tale che
Sia la curva di livello
Sia un punto di massimo o di minimo di , vincolato alla curva . In tal caso esiste un numero tale che
Il numero si chiama moltiplicatore di Lagrange e quando si usa il teorema precedente per la ricerca degli estremi vincolati si diche che si usa il metodo dei moltiplicatori di Lagrange. Posponiamo la dimostrazione formale del teorema e presentiamone prima di tutto una giustificazione di tipo geometrico.
Considerazioni geometriche che giustificano il metodo dei moltiplicatori di Lagrange. fissiamo l’attenzione sul punto di e consideriamo la curva di livello di ,
Il punto appartiene sia a che a . Supponiamo che la passi da una parte all’altra di . In questo caso la passa da una parte del piano in cui vale
ad una parte del piano in cui vale
e quindi il punto non è né di massimo né di minimo. Dunque, nei punti di massimo e di minimo vincolati, le due curve di livello e si toccano senza attraversarsi. La fig. 5.8 illustra questo caso.
Usando gli sviluppi di Taylor si prova che le due curve e si attraversano nel loro punto comune se le tangenti in tale punto si attraversano. Dunque nei punti di massimo e di minimo vincolato le due curve devono avere la medesima retta tangente e quindi la medesima retta normale. Questo caso è illustrato dalla figura 5.9 a sinistra mentre la figura 5.9 a destra mostra che le due curve di livello possono attraversarsi anche nel caso in cui le tangenti coincidono.
Sappiamo che la normale ad una curva di livello è nella direzione del gradiente della funzione e quindi nei punti di massimo oppure di minimo vincolato, e sono vettori colineari: esiste un numero tale che . Dunque, studiando il sistema della tre equazioni
| (5.10) |
nelle tre incognite , ed , si determinano dei punti tra i quali necessariamente si trovano gli estremi vincolati di .
Osservazione 173 Gli argomenti di tipo geometrico che abbiamo usato non sono rigorosi e inoltre fanno intervenire la curva di livello . Dunque implicitamente richiedono di lavorare in punti nei quali il gradiente della funzione non si annulla. Il teorema vale però anche se . Infatti, la dimostrazione analitica presentata più avanti non fa uso di condizioni sul gradiente di . I punti nei quali si annulla il gradiente di si trovano dalle (5.10) scegliendo . _
Esempio 174 Si voglia calcolare il punto su una curva piana, più vicino all’origine; ossia si voglia minimizzare sulla curva la funzione
Consideriamo il caso delle quattro curve seguenti:
ed è rappresentata in figura 5.10.
E’ facile vedere geometricamente che il punto del sostegno più vicino all’origine è il punto e questo è l’unico punto per cui esiste un tale che
Il valore di è .
Questo sistema non dà informazioni perché scegliendo si vede che ogni per cui risolve le tre equazioni.
Ogni valore per cui risolve questo sistema (con ).
Le soluzioni sono ora
Dato che è l’ellisse in figura 5.8, i punti sono di minimo mentre sono di massimo. Il metodo dei moltiplicatori di Lagrange, essendo solo basato sullo studio delle derivata prima, non permette di distinguere un caso dall’altro. _
Infine, applichiamo il metodo dei moltiplicatori di Lagrange per il calcolo dei punti estremi di una funzione di una sola variabile.
Esempio 175 Sia una funzione derivabile della sola variable . Introduciamo la funzione di due variabili, costante rispetto ad , data da
Calcolare i punti estremi di è come calcolare i punti estremi della funzione vincolati alla curva
Si noti che la funzione è di classe ed ha gradiente non nullo:
Quindi i punti estremi si possono calcolare mediante il metodo dei moltiplicatori di Lagrange, ossia risolvendo il sistema seguente nelle tre incognite , e :
La prima riga impone di limitarsi a considerare punti dell’asse delle ascisse. Dall’ultima riga si vede che deve essere . La penultima impone di guardare i valori di per cui . Si ritrova quindi la condizione che la derivata prima deve annullarsi nei punti estremi. _
Vediamo ora una dimostrazione analitica del metodo dei moltiplicatori di Lagrange, che si presta a ulteriori generalizzazioni. Valgano le ipotesi del teorema e sia un punto di estremo di vincolato alla curva di livello
Dato che la funzione è di classe e che , l’equazione definisce una curva piana, in un opportuno intorno di che si può esprime localmente mediante l’equazione oppure . Per fissare le idee supponiamo che valga la rappresentazione cosìche
| (5.11) |
Il punto è un punto di minimo vincolato per la funzione . Questo vuol dire che esiste un intorno di tale che se allora vale
Imponendo che sia nulla la derivata prima di per si trova
Si ha quindi
| (5.12) |
Dal Teorema della funzione implicita si sa che
Sostituendo in (5.12) si trova
Dunque, posto
si vede che
Anche le derivate rispetto ad verificano l’uguaglianza analoga,
col medesimo valore di . Infatti,
Ciò completa la dimostrazione.
Siano e due funzioni di classe , definite in un intorno di . Supponiamo che sia . Si ricordi che è punto di minimo di , vincolato a se
La definizione si estende facilmente ai punti di massimo vincolato. Vale:
Teorema 176 Sia un punto di minimo o di massimo, vincolato a . Supponiamo che il gradiente di non si annulli in . Allora esiste un numero per cui
| (5.13) |
Dim. Studiamo il caso del punto di minimo. Per fissare le idee, supponiamo che sia . Si espliciti rispetto alla variabile . Il punto è di minimo vincolato alla condizione , ossia, la funzione
ha minimo libero in . Dunque, ambedue le sue derivate parziali sono nulle:
Avendo supposto , si ha
ossia
Naturalmente vale anche
Definendo
si trova che vale la (5.13). _
Sia una funzione di classe in una regione e sia una curva in . Vogliamo dare una condizione necessaria che deve valere se un punto è punto di estremo di vincolato alla curva . Se la curva è data in forma parametrica il probema si riduce immediatamente alla ricerca degli estremi di una funzione di una sola variabile. Quindi consideriamo il caso in cui è data implicitamente, come intersezione di due superfici:
Sia un punto di , che è massimo oppure minimo di vincolato a . Supponiamo che in valga la condizione del teorema della funzione implicita. Privilegiando, per esempio, la variabile , supponiamo che si abbia
| (5.14) |
Si ricordi che sotto questa condizione la curva si rappresenta, in un intorno di in forma cartesiana, come
e
Dunque, la funzione della sola variabile
ha un punto di estremo in e quindi la sua derivata prima è ivi nulla:
Usando questa condizione, si potrebbe provare il teorema seguente:
Teorema 177 Sia punto di estremo della funzione vincolato alla curva
Valga inoltre la condizione (5.14). In tal caso esistono due numeri e tali che il punto è punto estremale libero della funzione
Ossia, nel punto valgono contemporaneamente le condizioni seguenti:
La coppia si chiama ancora moltiplicatore di Lagrange (vettoriale) ed i due numeri si chiamano moltiplicatori di Lagrange
Il metodo dei moltiplicatori di Lagrange dà condizioni necessarie che devono essere soddisfatte da un punto di estremo vincolato, senza necessità di esplicitare preventivamente l’equazione del vincolo. In ciascuno dei tre casi esaminati, le condizioni possono scriversi come segue: si introduce la funzione
Nei primi due casi esaminati, è un numero e è una funzione a valori reali; nell’ultimo caso è un vettore a due dimensioni, e il punto indica il prodotto scalare. In tutti i casi la ricerca del minimo o massimo vincolato di si riconduce alla ricerca dei punti estremali di . L’osservazione importante è questa: in generale gli estremi vincolati di sono solamente punti estremali di . Non sono nè punti di massimo n’e punti di minimo di . La funzione sopra introdotta si chiama lagrangiana del problema (di minimo, oppure di massimo).
La dimostrazione come conseguenza del Teorema della funzione implicita. Come si è detto, consideriamo il caso . Scriviamo in componenti la relazione
Ossia scriviamo quest’uguaglianza come
| (5.15) |
Vogliamo considerare questa come un sistema di equazioni nelle incognite . Per ipotesi si sa che
Si sa inoltre che e sono di classe e che
| (5.16) |
Consideriamo la prima equazione in (5.15), che scriviamo come
| (5.17) |
La (5.16) mostra che oppure . Sia per esempio
In tal caso si può risolvere l’equazione (5.17) rispetto alla variabile ottenendo, in un opportuno aperto contenente ,
Quando allora si ha , aperto contenente ed appartiene ad un intorno di . Consideriamo ora l’equazione seguente, nell’aperto :
Quest’uguaglianza è soddisfatta nel punto . Mostreremo in seguito che . Accettando ciò, il teorema della funzione implicita mostra che l’equazione si può risolvere rispetto a , ottenendo una funzione di classe
Questa uguaglianza vale per in un opportuno aperto contenente e la funzione è di classe . Sostituendo nell’uguaglianza (si veda la (5.18)) si ottiene la soluzione del sistema (5.15)
e, ricordiamo, le funzioni e sono di classe . Vediamo ora quali restrizioni sono state imposte ai punti ed . Questi sono rappresentati dalle condizioni
Si identifica così un aperto di , contenente il punto . L’aperto detto nel teorema è la proiezione di quest’aperto sul piano mentre l’aperto è la proiezione sul piano . Per completare la dimostrazione, proviamo che . Usando l’espressione di in (5.18) si trova
Le curve e le superfici in forma implicita sono già state incontrate. In questo capitolo studiamo le proprietà delle curve e delle superfici definite parametricamente. Saremo precisi nella definizione di curva mentre le “superfici” verranno definite in modo meno formale e preciso.
Conviene procedere per gradi nella definizione di curva. Una prima definizione, che verrà resa più precisa in seguito, è la seguente: Una trasformazione continua da un intervallo in si chiama curva parametrica. Nella definizione di curva l’intervallo può essere chiuso o meno, limitato o meno. Se però l’intervallo è chiuso e limitato la curva si chiama un arco. Una curva a valori in si rappresenta in coordinate cartesiane nella forma
La curva si dice piana quando la sua immagine appartiene ad un piano di , ossia quando esistono numeri , , , , indipendenti da , tali che per ogni valore di valga
Quando la curva è piana ed appartiene al piano essa si rappresenta semplicemente come
Notazione analoga quando la curva appartiene agli altri piani coordinati. Una curva si indica con una lettera greca minuscola:
In seguito noi ci limiteremo a considerare curve che hanno le seguenti proprietà di regolarità: la funzione è derivabile su con l’eccezione di un numero finito di punti . Si richiede che in questi punti (ed anche in e in se l’intervallo è limitato) esistano i limiti direzionali di . Inoltre si richiede che per si abbia . Una curva con tali proprietà si chiama regolare a tratti e si parla di curva regolare quando essa è ovunque derivabile, con per ogni . Sia una curva regolare e sia un punto della sua immagine. Una almeno delle componenti di , per esempio la prima componente , è invertibile in un intorno di . Dunque l’immagine della restrizione di a tale intorno è anche immagine di una funzione di . Si osservi che questo non implica che l’immagine di debba essere grafico di funzione, perch’e niente possiamo dire nei punti di “lontani” da . Questo è illustrato dalla figura 6.1, a sinistra, che riporta l’immagine, diciamo , della funzione
| (6.1) |
Si vede che quest’immagine non è grafico di funzione in nessun intorno di nonostante che la funzione sia invertibile. La sua inversa è
| (6.2) |
e quindi la relazione tra ed è la funzione
Il suo grafico è la parte spessa dell’immagine. Non esaurisce tutta la perché i valori di ottenuti da (6.2) sono solamente quelli dell’intervallo . E’ appena il caso di notare che una curva, oltre che in coordinate cartesiane, può rappresentarsi, per esempio, in coordinate polari.
Esempio 178 La curva
| (6.3) |
rappresenta una spirale, si veda la figura 6.1 a destra. Essa può anche rappresentarsi in coordinate polari, come
Consideriamo una curva piana. Questa si chiama curva cartesiana se è rappresentata mediante una parametrizzazione della forma
oppure
Più in generale, se è una curva in , si dice che questa è una curva cartesiana quando una delle componenti della funzione ha la rappresentazione . Un arco si dice chiuso quando una sua parametrizzazione , verifica . Una curva, oppure un arco, si dice semplice quando vale solamente per oppure se , . L’interpretrazione fisica del concetto di curva parametrica è suggerita dai problemi della meccanica: il parametro rappresenta il tempo ed il punto rappresenta la posizione all’istante di un punto massa mobile nel tempo. Quest’interpretazione spiega la condizione di continuità posta nella definizione di curva (un punto massa non fa salti). La funzione si chiama in fisica la legge del moto e il vettore rappresenta la velocità del punto all’istante . Si noti che la velocità può essere discontinua, per esempio quando si verificano urti. Introduciamo ora il “verso di percorrenza” su una curva parametrica semplice: Il parametro di una curva appartiene ad un intervallo di e è un insieme ordinato. Dunque possiamo introdurre un ordine su una curva semplice di parametrizzazione dicendo che il punto viene prima del punto quando ; ossia quando un punto mobile sulla curva traversa prima e poi . Si dice anche che, in tal caso, il punto precede . Nel caso che la curva sia semplice e chiusa, il punto coincide col punto e quindi sfugge alla definizione data di ordine.
Osservazione 179 La definizione di curva parametrica è una definizione soddisfacente per alcune applicazioni della fisica, ma non per tutte, ed è del tutto insoddisfacente per la geometria. Infatti, privilegia un modo di misurare il trascorrere del tempo. Ora, due orologi diversi possono segnare ore diverse perché sono stati azzerati in istanti diversi e anche perché uno va più velocemente dell’altro. Quindi il medesimo moto viene ad avere rappresentazioni diverse, a seconda dell’orologio che si usa per descriverlo. Dobbiamo quindi migliorare la definizione di curva, tenendo conto di ciò. Osservare una proprietà cruciale del tempo: il tempo non si ferma e va in una sola direzione. Questo vuol dire che se indico con il tempo segnato da un orologio, al medesimo istante un secondo orologio segnerà un diverso numero, diciamo . La corrispondenza che a fa corrispondere è continua (perché il tempo non fa salti) e monotona strettamente crescente (perché il tempo non si ferma e va in una sola direzione). Quest’osservazione è la chiave per capire la definizione generale di curva che daremo al prossimo paragrafo. _
Vogliamo ora completare la definizione di curva, tenendo conto delle ragioni esposte nell’osservazione 179. Si dice che si cambia parametrizzazione della curva quando si opera la sostituzione purché la funzione sia continua e strettamente crescente da un intervallo sull’intervallo . In pratica noi assumeremo anche che questa trasformazione sia derivabile (e quindi che sia ). Talvolta basterà supporre che la trasformazione sia derivabile a tratti. Rendendo più precisa la definizione di curva, si dice che , e , sono due diverse parametrizzazioni della stessa curva quando con la funzione strettamente crescente e suriettiva.1 Questa definizione corrisponde al concetto fisicamente intuitivo che una stessa “curva” può descriversi con leggi orarie diverse. Sia ora
e si consideri la trasformazione
Questa trasformazione è monotona decrescente e quindi la curva di parametrizzazione
è diversa dalla . Intuitivamente, la seconda curva si ottiene “percorrendo la all’indietro”. Quando si effettua questa trasformazione sul parametro della curva, si dice che “si è cambiato il verso di percorrenza della curva” e la curva cosìottenuta a partire dalla si indica col simbolo
| (6.4) |
Ora, alcune proprietà che dovremo studiare cambieranno al cambiare della parametrizzazione, ossia della legge del moto. Altre non dipenderanno dalla parametrizzazione. Le considereremo proprietà “geometriche” della curva. Vediamo alcuni casi:
Teorema 180 Parametrizzazioni diverse della medesima curva hanno la stessa immagine.
L’immagine comune a tutte le parametrizzazioni di una curva si chiama il sostegno di . Dunque il sostegno è una proprietà geometrica della curva. Lo stesso dicasi della proprietà di essere curva chiusa o curva semplice:
Teorema 181 Siano e due intervalli e siano , , due curve parametriche. Sia una trasformazione strettamente monotona da in , suriettiva, tale che
Allora, la curva parametrica è chiusa se e solo se la curva parametrica lo è; è semplice se e solo se lo è.
Ossia, le proprietà di essere chiusa, o di essere semplice, non dipendono dalla particolare rappresentazione parametrica di una curva ma solo dalla curva stessa: sono quindi proprietà geometriche della curva. E’ importante notare che le proprietà appena dette non cambiano nemmeno cambiando il senso di percorrenza della curva. Ossia:
se e solo se l’altra lo è.
Inoltre,
Teorema 182 l’ordine sulla curva non muta cambiando parametrizzazione.
E’ proprio per ottenere ciò che si è imposto che i cambiamenti di parametro debbano essere strettamente crescenti. L’ordine su è invece l’opposto di quello su . Quando la trasformazione da un intervallo su un intervallo è continua e strettamente monotona (crescente o meno) allora è sia limitato che chiuso se e solo se lo è. Dunque diremo che una curva è un arco quando una sua parametrizzazione è definita su un intervallo limitato e chiuso: la proprietà di essere un arco è una proprietà geometrica della curva e non cambia cambiando verso di percorrenza sulla curva, ossia essa è comune sia a che a . invece, dipendono dalla parametrizzazione sia la velocità che la proprietà di essere una curva cartesiana. Si consideri ora l’esempio seguente:
Esempio 183 le due curve
hanno il medesimo sostegno (la circonferenza ). Le due parametrizzazioni però non possono ricondursi l’una all’altra mediante un cambiamento di parametro (che deve essere strettamente crescente) perché la prima curva è semplice e l’altra non lo è. _
Gli archi semplici2 hanno molte proprietà importanti. Tra queste:
Teorema 184 Sia
un arco semplice (chiuso o meno). Esiste soltanto un diverso arco che ha il medesimo sostegno, e questo è l’arco .
Grazie a questo risultato, trattando di archi semplici, possiamo usare un linguaggio più informale: se si sa che un insieme è sostegno di un’arco semplice, possiamo parlare di “arco ” intendendo uno dei due archi che hanno per sostegno. In generale si intende anche di aver fissato un verso di percorrenza su , e in tal caso si sceglie quello dei due archi che corrisponde a tale verso. Per esempio, sia
L’insieme è una circonferenza nello spazio. Possiamo parlare dell’“arco ” intendendo implicitamente di considerare come sostegno di un arco semplice e di scegliere una qualsiasi delle parametrizzazioni che corrispondono a tale arco. Se si stabilisce un verso di percorrenza su , si viene a scegliere uno solo dei due archi che hanno per sostegno. Si noti però che in generale non esiste un modo unico per la scelta del verso di percorrenza e quindi questo linguaggio informale non identifica univocamente l’arco. Vedremo che questa diffcoltà si risolve nel caso delle curve semplici e chiuse.
Studiamo il problema di definire un numero che rappresenti la “lunghezza” di un arco in . Consideriamo per questo un arco (che indichiamo col simbolo ) di parametrizzazione , . Si sa che la tangente al grafico della funzione nel punto ha equazione
Dividiamo l’intervallo mediante i punti , equidistanti, ,…, e approssimiamo l’arco con tanti segmenti di tangente, si veda la figura 6.2: l’arco , si approssima mediante il segmento di tangente
Sommiamo le lunghezze dei singoli segmenti di tangente. Ripetendo questo procedimento per ogni si costruisce una successione di numeri . Se esiste , si sceglie questo numero come “lunghezza” dell’arco . Più precisamente, supponiamo che la funzione sia di classe e supponiamo che essa ammetta le derivate direzionali finite in ambedue gli estremi e . Per definire la lunghezza del’arco, si divide l’intervallo in parti uguali mediante i punti , e . Il segmento di tangente al grafico nel punto ottenuto per ha lunghezza
La lunghezza totale dei segmenti di tangente è il numero
Se esiste, il numero è l’integrale della funzione sull’intervallo . Dunque, definiamo la lunghezza dell’arco ponendo
| (6.5) |
Osservazione 185 Al numero siamo giunti scegliendo di dividere l’intervallo in parti uguali. Non è diffcile mostrare che allo stesso numero si perviene considerando una qualsiasi partizione di , la cui finezza tende a zero. Ci si può chiedere però a quale numero si giunge se, invece di “approssimare” il grafico con segmenti di tangente, si sceglie di approssimarlo con segmenti di secante. E’ possibile provare che si giunge al medesimo numero , dato da (6.5). _
Teorema 186 La lunghezza di un arco non muta cambiando parametrizzazione.
Dim. Sia una trasformazione crescente da su . Sia inoltre essa ovunque derivabile cosìche . Sia . La regola di cambiamento di variabile mostra che
Dunque, il numero che esprime la lunghezza di un arco è una proprietà geometrica dell‘arco. Vale inoltre:
Teorema 187 La lunghezza di un arco non muta cambiando il verso di percorrenza sulla curva. Ossia:
Dim. Infatti, se allora
e . Dunque anche in questo caso vale
Osservazione 188
In questo caso,
| (6.6) |
La lunghezza dell’arco ottenuto quando è quindi data da
Definiamo ora la funzione
Se l’arco è regolare, per ogni . Ossia la trasformazione da su è un cambiamento di parametro per l’arco . Il numero si chiama per questo il parametro d’arco. Se come parametro di si sceglie si trova una nuova parametrizzazione dell’arco , che indichiamo con e che si chiama la parametrizzazione canonica dell’arco. La sua proprietà importante è che
Infatti, essendo la funzione inversa di , si ha:
Dunque, quando la curva è data mediante la sua parametrizzazione canonica, la formula per la lunghezza si riduce a:
Il parametro d’arco si presta allo studio delle proprietà geometriche delle curve. Però la parametrizzazione mediante il parametro d’arco è spesso piuttosto complicata e spesso non si presta a fare calcoli concreti. Concludiamo dicendo che in fisica la funzione si chiama legge oraria del moto.
Studiamo prima di tutto il caso delle curve piane. Supponiamo che l’arco sia parametrizzata dalla sua lunghezza,
e supponiamo che sia regolare a tratti; ossia che la funzione sia ovunque continua; inoltre supponiamo che essa sia derivabile, con su , con la possibile eccezione di un numero finito di valori ,…, di . In tali punti richiediamo che esistano finiti3 i limiti direzionali i limiti direzionali di . Il versore
applicato nel punto si chiama il versore tangente alla curva nel punto . Il versore tangente è definito salvo che in un numero finito di valori di . Per ogni nel quale è definito, introduciamo il versore ortogonale a e diretto in modo tale che la coppia sia orientata positivamente (ossia, possa sovrapporsi ordinatamente ai versori e degli assi coordinati mediante una rotazione e una traslazione di assi). Il versore si chiama il versore normale alla curva . Vale:
Teorema 189 Sia una curva regolare, la cui parametrizzazione è di classe . Allora il vettore è derivabile e in ogni punto è colineare col vettore .
Dim. Infatti, per tutti gli e quindi per ogni . Dunque, . Ciò mostra che per ogni valore di i due vettori ed sono colineari. fissiamo ora un valore in cui ammette derivata continua e supponiamo4 che sia . Ciò vuol dire che
Per continuità, la disuguaglianza si conserva in un intorno di e ciò mostra che in un intorno di vale
Il denominatore non si annulla e quindi è derivabile. _
Osservazione 190 Si ricordi che la derivata del versore è il limite del rapporto incrementale
applicato in . _
Supponiamo ora di lavorare con parametrizzazioni di classe di curve regolari, e studiamo . Si è visto nella dimostrazione del Teorema 189, che è parallelo al versore . Esiste quindi un numero tale che
| (6.7) |
Il numero , che può essere positivo o negativo, si chiama la curvatura di nel punto . Prendendo la norma dei vettori ai due membri di (6.7) si trova
L’esempio seguente mostra che la curvatura può cambiare segno da punto a punto di una medesima curva; e mostra anche che per calcolare tangenti, normali e curvatura non è necessario parametrizzare preventivamente la curva col parametro d’arco.
Esempio 191 Sia cosìche
Dalla formula per la derivata della funzione inversa
Dunque,
Si trova da qui
La curvatura ha quindi il segno di . Si confronti con la definizione di curvatura data al par. 6.3 del testo di Analisi Matematica 1. _
Osserviamo ora che e quindi, derivando,
| (6.8) |
D’altra parte, è ortogonale ad (perch’e ) e quindi
Sostituendo nella (6.8) si vede che . Ne viene che le due funzioni ed risolvono il sistema di equazioni differenziali
| (6.9) |
Queste equazioni si chiamano Equazioni di Frenet per le curve piane. Il sistema di riferimento dato dai due versori , (in quest’ordine) applicati nel punto si chiama il riferimento mobile sulla curva. La figura 6.3 illustra il riferimento mobile nel caso in cui la curva venga percorsa in due versi opposti.
Studiamo ora il caso delle curve di . Intendiamo ancora che la curva sia parametrizzata dal parametro d’arco. La definizione del versore tangente è ancora
Invece, la curvatura deve essere trattata in modo diverso. Assegnato il vettore tangente alla curva e di modulo , è ancora vero che è ortogonale a . Dunque privilegeremo, tra le infinite direzioni normali a , la direzione di ; ma non c’è alcun modo di privilegiare un verso su tale direzione. Dunque decidiamo di scegliere come versore normale il versore
| (6.10) |
Chiamiamo questo il versore normale alla curva . Chiamiamo curvatura il numero tale che
In questo modo,
Osservazione 192 Se una curva regolare è piana, il suo versore normale è ovunque definito. Invece, una curva nello spazio potrebbe essere priva di versore normale su tutto un arco o addirittura ovunque. Ciò avviene se è nullo. In particolare, può accadere che sia identicamente zero su un intervallo. In questo caso, l’arco corrispondente è piano, parametrizzato da
La definizione di versore normale data in non si applica in questo caso. _
E’ importante sapere che vale il teorema seguente, di enunciato del tutto intuitivo ma di dimostrazione molto complessa:
Teorema 193 (teorema di Jordan) Sia una curva piana chiusa e semplice. Il complementare del sostegno di è unione di due regioni. Una di esse è illimitata (e si dice esterna alla curva) mentre l’altra è limitata e si dice la regione interna alla curva.
Il teorema è illustrato nella figura 6.4, a sinistra.
Il sostegno di è la frontiera sia della regione interna che della regione esterna di (si veda il paragrafo 3.3 per la definizione di frontiera).
Esempio 194 La curva
ha per sostegno un’ellisse. La sua regione interna è la parte di piano delimitata dall’ellisse. La regione esterna è quella dei punti che “stanno fuori” dall’ellisse. _
Ovviamente, non esiste alcun “teorema di Jordan” per curve dello spazio! Usa chiamare regione di Jordan la regione interna ad una curva piana semplice e chiusa. Se indica la curva, conviene indicare con la sua regione interna. Vale:
Teorema 195 Sia una curva semplice e chiusa. E’:
La regione interna ad una curva piana semplice e chiusa può essere assai complicata; ma nella maggior parte dei casi che si incontrano nelle applicazioni sarà facile identificarla. Nel paragrafo 6.1 abbiamo usato l’ordinamento su per definire un ordine sulla curva . Nel par. 3.2.1 abbiamo notato che il piano può venire orientato con la regola seguente: la coppia dei vettori e applicati in e presi in quest’ordine, è orientata positivamente quando la semiretta identificata da deve ruotare in verso antiorario per portarsi su quellaidentificata da , percorrendo l’angolo minore possibile. Si veda la figura 6.5 a sinistra. Questa definizione può anche riformularsi mediante la regola d’Ampère: una persona stando in piedi nell’origine del piano con la testa nel verso positivo dell’asse delle quote vede la semiretta muoversi in verso antiorario, e quindi la vede passare dalla sua destra alla sua sinistra.
Sia ora una curva piana semplice e chiusa. Ricordiamo che il suo sostegno è sostegno, oltre che di , soltanto della seconda curva , che si ottiene “andando all’indietro”. Diciamo che è orientata in modo concorde a , o anche che è orientata positivamente, se vale la regola d’Ampère: una persona in piedi in un punto della regione interna alla curva, stando in piedi come l’asse delle quote positivo, vede un punto mobile sulla curva passare dalla sua destra alla sua sinistra. In modo equivalente, si può anche dire che un insetto che segue il punto mobile su una curva semplice e chiusa vede la regione interna alla sua sinistra, si veda la figura 6.5 a destra. Altrimenti, diciamo che è orientata negativamente. Vale:
Teorema 196 Delle due curve semplici e chiuse, e , una è orientata positivamente e l’altra è oreintata negativamente.
Supponiamo ora che la curva piana semplice e chiusa sia anche regolare, cosìche si possono definire sia il vettore tangente che il vettore normale . Il vettore normale può puntare sia verso la regione interna che verso la regione esterna alla curva. Per il seguito avremo bisogno del vettore normale che punta verso la regione esterna alla curva (si veda la figura 6.4, a destra). Lo indicheremo col simbolo
e lo chiameremo la normale esterna.
Osservazione 197 Al paragrafo 6.1.3 si è definito il vettore come il vettore normale a , orientato in modo tale che la coppia ordinata costituisca un sistema di riferimento positivo. Dunque punta verso la sinistra di . Quando la curva è orientata positivamente, allora punta verso la regione interna alla curva. Quindi, in questo caso si ha . _
Torniamo ad usare il fatto che il sostegno di una curva semplice e chiusa è sostegno anche di una seconda curva, che si ottiene dalla prima “girando in verso opposto”. Quest’osservazione permette di introdurre un linguaggio più informale, che tuttavia è limitato alle curve piane. Supponiamo che si sappia che un certo insieme del piano è il sostegno di una curva semplice e chiusa. Per esempio un quadrato o una circonferenza. Invece di scrivere esplicitamente la parametrizzazione della curva, possiamo indicare il sostegno e implicitamente intendere di scegliere quella curva semplice che ha il sostegno dato e che è orientata positivamente, senza dover esplicitamente scrivere una sua parametrizzazione. In particolare, se è la regione interna ad una curva semplice e chiusa , e se vogliamo che sia orientata positivamente, potremo semplicemente indicarla come “frontiera di ”, .
Osservazione 198 Con questa convenzione, se è un sostegno di curva semplice e chiusa, si indica con (o, per ridondanza, ) la curva semplice e chiusa che ha il dato sostegno e che è orientata positivamente, e con quella che ha il dato sostegno ed è orientata negativamente. _
Studiamo ora le superfici in . Considerazioni analoghe a quello che hanno condotto a definire prima le curve parametriche e poi le curve come “oggetti geometrici” si possono ripetere per le superfici. Però sono alquanto complesse e quindi ci limiteremo a definire le superfici parametriche, mostrando quando certe proprietà che ci interessano sono indipendenti dalla parametrizzazione scelta.
Nel definire le curve è stato naturale partire da funzioni continue definite su intervalli. Per definire le superfici dobbiamo considerare funzioni continue di due variabili, definite quindi su un dominio contenuto in . richiederemo che il dominio sia una regione. Una funzione continua
| (6.11) |
il cui dominio è una regione di si chiama una superficie definita parametricamente. L’immagine della funzione si chiama il sostegno della superficie mentre il punto variabile in si chiama il parametro della superficie. Una superficie si dice semplice quando valori diversi del parametro hanno per immagine punti diversi del sostegno. Una superficie si dice chiusa quando il suo sostegno è la frontiera di una regione di . Sia
una superficie. Diremo che la superficie è regolare quando la trasformazione (6.11) è di classe e inoltre la matrice jacobiana della trasformazione
| (6.12) |
ha rango , ossia il massimo possibile, in ogni punto della regione . Cosìcome nel caso delle curve, una stessa superficie può parametrizzarsi in più modi. Senza entrare in eccessivi dettagli, diremo che una trasformazione
è un cambiamento di parametro quando è definita su una regione , a valori in ; è iniettiva e suriettiva; è di classe e inoltre conserva l’orientazione di , ossia il suo jacobiano è positivo in ogni punto:
Si noti l’analogia con la nozione di cambiamento di parametro per una curva. Anche nel caso delle curve il cambiamento di parametro deve conservare l’orientazione, in tal caso l’orientazione di . E’ ovvio che cambiando parametro non si cambia il sostegno di una superficie. Diremo equivalenti, e le identificheremo, due superfici che differiscono solamente per la parametrizzazione. Le funzioni definite su , a valori in , sono particolari superfici, rappresentate da
Esse si chiamano superfici cartesiane. Il sostegno in questo caso è il grafico della funzione . Sia ora una regione di Jordan e sia una funzione continua sull’insieme chiuso costituito dall’unione della regione e del supporto di . In tal caso la funzione si chiama calotta Ovviamente, la restrizione di ad è una superficie. Conviene estendere la definizione di calotta in questo modo. Siano date, oltre alla , anche le curve di Jordan , ,…, i cui sostegni non si intersecano. Supponiamo che ciascuna di queste curve abbia sostegno in . Indichiamo con l’insieme chiuso i cui punti sono quelli del sostegno di e della sua regione interna , esclusi i punti della regione interna a ciascuna (e quindi inclusi i punti dei sostegni delle . La figura 6.6 mostra in tratteggio un esempio di insieme .
Se la funzione in (6.11) è continua su essa si chiama calotta. Si chiama sostegno della calotta l’immagine della funzione . L’insieme dei punti interni di è ancora una regione (anche se non più una regione di Jordan) e quindi la restrizione di a tale insieme è una superficie. Parleremo di calotta chiusa se accade che la calotta è frontiera di un insieme aperto di .
Osservazione 199 Non si confonda il concetto di “insieme chiuso” con quello di “superficie chiusa” o di “calotta chiusa”. La calotta di parametrizzazione
definita sul disco ha per sostegno un insieme chiuso; ma la calotta stessa è contenuta nel piano e quindi non è una calotta chiusa. _
Una superficie, oppure una calotta, si indica con una lettera greca maiuscola, come per esempio o . Il concetto seguente è molto delicato e noi ci limitiamo a darne una definizione grossolana. Supponiamo di avere una calotta
Supponiamo che la calotta sia semplice ossia che
possa aversi solo se e . In tal caso si chiama bordo della calotta l’immagine della frontiera dell’insieme ; ossia l’immagine delle singole curve che delimitano l’insieme . La figura 6.7 mostra una calotta e il suo bordo.
Esempio 200 Si è detto che la definizione di bordo è insoddisfacente. Quest’esempio ne mostra la ragione. Consideriamo la calotta definita come segue. La funzione è
| (6.13) |
Il dominio della funzione è
con . Si tratta di un cilindro a cui è stata tolta una striscetta, come in figura 6.8.
Questa calotta è una calotta semplice e il suo bordo è costituito dai due archi di circonferenza (archi della circonferenza di sopra e di quella di sotto, alle quali è tolto l’arco che corrisponde a ) e dai bordi del taglio che le congiungono. Supponiamo ora di mandare a zero. In tal caso si trova un cilindro intero. La sua parametrizzazione non è più semplice, e quindi non possiamo più parlare di “bordo” secondo la nostra definizione, anche se appare naturale considerare le due circonferenze come il bordo del cilindro. Mentre il contributo dei due bordi del taglio “scompare”. Quest’esempio mostra che dovremmo dare un modo per definire il “bordo” anche per calotte che non sono semplici. Per esempio anche nel caso del cilindro ottenuto scegliendo . La soluzione ovvia è quella di scegliere come bordo l’immagine della frontiera dell’insieme , in quest’esempio l’immagine del perimetro del rettangolo . In questo modo si otterrebbe come bordo l’insieme delle due circonferenze ed anche il segmento verticale dei punti di coordinate , . Questa soluzione però non è accettabile. Infatti lo stesso cilindro si parametrizza anche scegliendo come dominio della funzione (6.13) l’insieme
e con questa parametrizzazione si trova un’altro insieme come “bordo”: l’insieme costituito dalle due circonferenze e dal segmento dei punti , . Ossia, il bordo cosìdefinito viene a dipendere dalla particolare parametrizzazione che si sceglie. Ci sono vari modi per risolvere questa diffcoltà: uno, più astratto, consiste nel considerare tutte le parametrizzazioni della calotta, ciascuna definita su un proprio insieme . Si considerano quindi le immagini di tutte le frontiere di questi insiemi e se ne fa l’intersezione. Noi seguiremo una via “più concreta” che si adatta ai casi semplici che incontreremo nelle applicazioni e che sarà illustrata al paragrafo 8.5.2. _
Sia
una superficie regolare e semplice. fissiamo l’attenzione su un punto del sostegno. Dato che la superficie è semplice, questo proviene da un unico punto del dominio:
Consideriamo ora il segmento per , parallelo all’asse delle ascisse, ossia la curva
Questo identifica una curva sulla superficie, parametrizzata da
La tangente a questa curva calcolata per , ossia in , è identificata dal vettore (applicato in )
| (6.14) |
Analogamente, considerando un segmento per parallelo all’asse delle ordinate, si trova una curva sulla superficie, la cui tangente in è identificata dal vettore (applicato in ):
| (6.15) |
In generale, il segmento
identifica una curva sulla superficie, il cui vettore tangente è identificato dal vettore
I vettori e dipendono da :
e sono le due colonne della matrice jacobiana (6.12) e quindi sono linearmente indipendenti (infatti abbiamo assunto che la superficie sia regolare). Dunque al variare di e di in , i vettori applicati in descrivono un piano per , che si chiama il piano tangente alla superficie nel punto . Si noti esplicitamente che intendiamo di scegliere come sistema di riferimento cartesiano (in generale, obliquo) in questo piano le rette identificate al vettore per primo e quindi . E’ su questi assi cartesiani si sceglie per verso positivo quello dei rispettivi vettori. Dunque sul piano tangente è definita un’orientazione. Definiamo ora il vettore normale ponendo
Il vettore si intende applicato nel punto . E’ ovvio:
Teorema 201 Se la superficie semplice è regolare, sia i vettori , che il vettore normale dipendono con continuità da .
Si ricordi che la superficie si è supposta semplice. Quindi ogni proviene da un unico punto . Dunque in ogni punto di una superficie regolare e semplice il vettore normale sopra definito è unico e questo vettore si potrà considerare come funzione del punto della superficie: . Si è cosìdefinito un campo vettoriale sulla superficie. I concetti appena esposti sono illustrati nella figura 6.9.
Se la superficie è cartesiana si ha:
Per il seguito è importante ricordare la formula per nel caso di una superficie cartesiana:| (6.16) |
Si confronti questa formula con la (6.6). Studiamo ora come cambiano i vettori , e il vettore sotto l’azione dei cambiamenti di parametro. Sia , una trasformazione biunivoca (e di classe ) da una regione su e consideriamo la parametrizzazione
Le derivate rispetto ad ed si calcolano mediante la regola di derivazione a catena. Poniamo:
Per semplicità di notazioni, scriviamo invece di (e analoga notazione per le derivate di e di , e per le derivate rispetto a ). Si ha:
La componente lungo il versore del prodotto vettoriale è
Proseguendo in modo analogo al calcolo delle altre componenti si trova:
Il numero è lo jacobiano del cambiamento di parametro. Esso è positivo per la definizione di cambiamento di parametro.
Teorema 203 effettuando un cambiamento di parametro la normale alla superficie non cambia né direzione né verso.
Per questa ragione si dice che i cambiamenti di parametro (che hanno jacobiano positivo) lasciano invariata l’orientazione della superficie. Si dice che cambiano l’orientazione della superficie quelle trasformazioni che hanno jacobiano negativo.
Torniamo a considerare le curve nello spazio e completiamo le considerazioni svolte al paragrafo 6.1.3. In quel paragrafo abbiamo definito la tangente e la normale ad una curva. Il piano identificato dai vettori e , applicati in , si chiama il piano osculatore alla curva nel punto . Notiamo ora che è identicamente zero e quindi ha derivata nulla. Dunque,
| (6.17) |
Introduciamo ora il versore , definito da
Il versore è quindi ortogonale a e ed orientato in modo tale che la terna sia orientata positivamente. Si veda la figura 6.10 per un esempio. Il sistema di assi cartesiano ortogonali che abbiamo descritto varia da punto a punto della curva. Per questa ragione si chiama sistema di riferimento mobile sulla curva.
Il vettore si chiama il versore binormale alla curva. La derivata di è ortogonale a perché per ogni e quindi appartiene al piano di e per ogni . Si ha quindi
D’altra parte,
Ora, è colineare con e quindi il loro prodotto vettoriale è nullo. Rimane quindi
Il vettore è ortogonale sia a che a . E’ quindi un multiplo di . Dunque, per ogni esiste un numero tale che
| (6.18) |
Da qui si trova
Essendo identicamente zero, derivando si trova anche che
| (6.19) |
Il numero può essere positivo negativo o nullo. Esso si chiama la torsione della curva. Cerchiamo ora di esprimere mediante e . Ciò è possibile perchè , essendo ortogonale a , è nel piano di e di . Dunque
| (6.20) |
Moltiplicando scalarmente i due membri di (6.20) per ed usando (6.17) si trova
Analogamente, moltiplicando scalarmente (6.20) per ed usando (6.19) si trova
Si trova quindi che i versori , , verificano
Si chiamano queste le equazioni di Frenet per curve di . Il sistema di riferimento dato dai tre versori , , applicati in si chiama ancora il riferimento mobile sulla curva.
La maggior parte delle considerazioni che abbiamo svolto si estendono senza alcuna diffcoltà a curve
Per esempio è ancora vero che una curva in che è semplice è identificata dal suo sostegno a meno dell’orientazione; si definisce ancora la lunghezza dell’arco ponendo
è quindi possibile definire il parametro d’arco. La tangente e la normale si definiscono ancora nel medesimo modo come per le curve in . Non esiste invece una unica “binormale”. Per completare il il riferimento mobile sulla curva si devono introdurre, oltre alla tangente ed alla normale, altri vettori e quindi le equazioni di Frenet diventano più complesse.
In questo capitolo introdurremo gli integrali di funzioni di due o tre variabili. Le idee che si seguono per definire l’integrale sono simili a quelle che si usano per definire l’integrale delle funzioni di una sola variabile e quindi le illustreremo per sommi capi1. Una differenza importante tra le definizione di integrali per le funzioni di una o più variabili è nella scelta dei domini di integrazione. Per le funzioni di una variabile è naturale scegliere gli intervalli. Per le funzioni di più variabili c’è molta più libertà. Noi sceglieremo come domini di integrazione gli insiemi che sono delimitati da grafici di funzioni continue (si veda più avanti per una definizione più precisa). Tali insiemi si chiameranno domini di integrazione. Studieremo la definizione dell’integrale di di una classe di funzioni che saranno costruite a partire da funzioni continue su insiemi chiusi e limitati.
La proprietà importante è che la posizione di in non ha importanza. Inoltre, non abbiamo indicato esplicitamente le variabili della funzione perché questo risultato vale per funzioni di un qualsiasi numero di variabili (anche per funzioni di una sola variabile. In questo caso , nonostante che questo risultato non sia stato provato nel corso di Analisi Matematica 1.) Questa proprietà delle funzioni continue su insiemi chiusi e limitati si chiama continuità uniforme.
Introduciamo prima l’integrale di funzioni di due variabili, che presenteremo con maggiori dettagli, e poi l’integrale delle funzioni di tre variabili, che presenteremo in modo più conciso.
Chiameremo dominio di integrazione semplice un insieme che ha una delle proprietà seguenti:
Un insieme chiuso e limitato si chiama dominio di integrazione quando si può rappresentare come unione di domini di integrazione semplici in modo tale che due qualsiasi di essi non abbiano punti interni comuni (ossia, gli eventuali punti comuni a due domini di integrazione semplici appartengono alle rette o ai grafici che li delimitano)2. Per brevità un dominio di integrazione semplice si chiamerà “dominio semplice” ma è importante ricordare che è un caso speciale di dominio di integrazione. In conclusione, un dominio di integrazione si rappresenta (non in modo unico) come unione di domini semplici
| (7.1) |
La figura 7.1 mostra esempi di domini di integrazione. Quello a sinistra è la parte del trapezoide di una funzione che è sopra alla retta orizzontale ed automaticamente sotto alla retta . E’ quindi la differenza insiemistica tra il trapezoide di e quello della funzione che vale costantemente . Il dominio di integrazione a destra è più complesso, suddiviso mediante grafici di varie funzioni , oppure , ciascuna continua e definita su un opportuno intervallo limitato e chiuso.
Introduciamo ora la classe di funzioni per cui definiremo l’integrale3. Chiamiamo integrabile una funzione definita su un dominio di integrazione (o almeno nei suoi punti interni) e con questa proprietà: E’ possibile trovare una rappresentazione di come in (7.1) in modo tale che per ogni indice la funzione ammetta estensione continua al dominio semplice . Ossia, gli eventuali punti di discontinuità della funzione devono essere sulle rette o grafici che delimitano i domini semplici che compongono .
Sia una funzione integrabile. Per definirne l’integrale, procediamo in questo modo: definiamo l’integrale di su ciascuna dei domini semplici e quindi definiamo l’integrale su come somma degli integrali sui domini . Si noti che il dominio si potrà decomporre in più modi e quindi andrebbe provato che l’integrale di non dipende dalla decomposizione scelta per il dominio. Questo è vero ma noi non lo proveremo. Per semplicità limitiamoci a illustrare la definizione dell’integrale di sul dominio semplice rappresentato nella figura 7.1 a sinistra. Indichiamo con tale dominio semplice,
Si segua il procedimento guardando la figura 7.2.
Dividiamo in parti uguali con i punti , . Consideriamo quindi i segmenti verticali i cui punti hanno ascissa e che sono contenuti in , come in fig. 7.2, a sinistra. Suddividiamo ora anche il segmento dell’asse delle ordinate in tratti uguali. Le rette orizzontali i cui punti hanno ordinata uguale ai punti di suddivisione dell’intervallo disegnano una divisione dell’insieme in rettangoli completamente contenuti in , e inoltre certi sottoinsiemi a lati non rettilinei, che escludiamo. Si guardi la figura 7.2, a destra. In questo modo il trapezoide della funzione viene ad essere approssimato da una rete di al più rettangolini, che indichiamo con , , . Ciascuno di questi rettangoli ha area . Indichiamo con la loro unione. Notiamo che nessuno dei rettangolini è a cavallo del grafico di e che . Per ipotesi, la funzione appartiene alla classe delle funzioni integrabili e quindi la sua restrizione a ammette estensione continua a tutti i punti del dominio di integrazione , che è chiuso e limitato. Indichiamo ancora con tale estensione, che è uniformemente continua. Costruiamo ora le somme
Queste somme sono estese a tutti i rettangoli che appartengono ad . Ora usiamo l’uniforme continuità di . Si fissi un qualsiasi e il corrispondente . Se ed sono abbastanza grandi, diciamo , , la diagonale di ciascuno dei rettangoli costruiti misura meno di e quindi per , si ha
In particolare
Ma,
Dunque
e questo numero si chiama l’integrale di sul trapezoide . Esso si indica col simbolo
In modo analogo si definisce l’integrale su ogno altro dominio . Si definisce quindi
| (7.2) |
Osservazione 205 E’ ovvio dalla costruzione che abbiamo fatto che se allora il suo integrale si interpreta come il volume del solido compreso tra l’insieme del piano ed il grafico della funzione. Se in particolare si sceglie identicamente uguale ad , si trova una numero che ha senso interpretare come area del dominio di integrazione. Ossia per definizione:
| (7.3) |
Se accade che è grafico di una funzione continua su abbiamo due diverse definizioni di area: quella appena scritta e quella data durante il corso di Analisi Matematica 1: area del trapezoide di una funzione positiva uguale (per definizione!) al suo integrale. Si tratta di due definizioni diverse ma vedremo che conducono al medesimo numero. Un fatto da sottolineare è questo: è l’area del trapezoide solo se . Invece, la (7.3) dà il valore dell’area anche quando è trapezoide di una funzione che cambia segno. _
Talvolta, un integrale di una funzione di due variabili si chiama anche integrale doppio Per contrasto, l’integrale di una funzione di una sola variabile,
si chiama anche integrale semplice
Le proprietà dell’integrale sono le stesse come nel caso degli integrali semplici:
e se la funzione è integrabile sia su che su , allora è anche integrabile su , e viceversa; e inoltre
Anche il teorema della media si può riformulare. Indichiamo con l’area di , calcolata sommando le aree delle singole regioni che la compongono. Vale:
Ne segue:
Sia
una curva di Jordan regolare. Applicando il Teorema della funzione implicita si vede che il sostegno è localmente un grafico e si potrebbe provare che il sostegno è grafico di un numero finito di funzioni. Dunque, l’unione della regione , interna alla curva e del suo sostegno è un dominio di integrazione. Come si è notato all’osservazione 204, diremo che la regione stessa è un dominio di integrazione e quindi è possibile:
Con lo stesso abuso di linguaggio illustrato all’osservazione 204, diremo ancora che una regione di Jordan si può approssimare mediante rettangoli.
Torniamo a considerare le somme ed che servono per definire l’integrale doppio. Consideriamo per esempio le :
Calcoliamo le somme prima di tutto sommando i termini che corrispondono a rettangolini che appartengono alla stessa striscia verticale, ossia scrivendo
fissiamo un punto in ciascuno degli intervalli . Si mostra che per tende a zero la differenza tra la parentesi graffa e l’integrale
ove è un qualsiasi punto dell’intervallo ; e quindi che
con
Ma, per , le somme
convergono all’integrale della funzione di
ossia all’integrale iterato di . Dunque, per calcolare si può procedere come segue:
Si veda la figura 7.3
Naturalmente la stessa procedura vale anche scambiando il ruolo dell’asse delle ascisse con quello dell’asse delle ordinate. Consideriamo un caso particolare: supponiamo che sia il trapezoide della funzione , , e che la funzione integranda sia identicamente uguale ad . Sia inoltre non negativa. In tal caso,
in accordo con quanto detto nell’osservazione 205. Il metodo visto “riduce” il calcolo di un integrale doppio a quello di un integrale iterato, e quindi a quello di due integrali semplici. Però esso può anche usarsi al contrario, per ricondurre il calcolo di un integrale iterato calcolato prima rispetto ad e poi rispetto ad al calcolo di un integrale doppio; e quindi al calcolo di un integrale iterato calcolato prima rispetto ad e poi rispetto ad . Quando si opera in questo modo su un integrale iterato si dice che si scambia l’ ordine d’integrazione.
L’integrazione delle funzioni di tre variabili si introduce in modo del tutto analogo a quella relativa a funzioni di due variabili. Prima di tutto si scelgono i domini di integrazione semplici: questi sono i solidi delimitati dai grafici di due funzioni, per esempio
con , dove è un dominio di integrazione semplice per funzioni di due variabili. Anche i domini di integrazioni semplici per funzioni di tre variabili sono insiemi chiusi. Come dominio di integrazione per funzioni di tre variabili intendiamo l’unione di un numero finito di tali domini semplici, purché l’intersezione tra due qualsiasi di essi non contenga punti interni. Definiamo ora l’insieme delle funzioni integrabili. Una funzione definita su un dominio di integrazione si dice integrabile quando la sua restizione all’interno di ciascuno dei domini semplici ammette estensione continua al dominio semplice stesso. Ciò detto è facile dividere un dominio di integrazione in “piccoli” parallelepipedi e costruire le analoghe delle somme ed e quindi definire
come estremo comune ai due insiemi ed che ora verranno a dipendere da tre indici , , . Si ottiene cosìun integrale che si chiama anche integrale triplo
Osservazione 207 Per definizione, il volume di un dominio di integrazione è
Le proprietà elencate al paragrafo 7.1.2 per gli integrali doppi valgono anche per gli integrali tripli. Per gli integrali tripli, il Teorema 210 si riformula come segue:
Teorema 208 Sia una trasformazione continua da un dominio di integrazione ad un dominio di integrazione . Supponiamo che la trasformazione ammetta derivate parziali continue nei punti interni di e che le derivate abbiano estensione continua alla frontiera, e che il suo determinante jacobiano non si annulli. Per ogni funzione continua su si ha:
Invece, il metodo di riduzione va esaminato esplicitamente.
Il calcolo degli integrali tripli si può ricondurre al calcolo di integrali iterati. Illustriamo il metodo nel caso particolare in cui il dominio di integrazione è compreso tra due grafici
Indichiamo con
ossia la proiezione ortogonale di sul piano . Dunque:
Vale:
In questo modo il calcolo dell’integrale triplo si è ricondotto al calcolo di un integrale semplice, seguito da quello di un integrale doppio4. Si veda la figura 7.4, a sinistra.
Si può anche procedere in modo diverso: supponiamo di sapere che sia delimitato da due grafici, per esempio
e sia il dominio comune ad e . Allora vale:
dove è l’intersezione di col piano parallelo agli assi e , passante per il punto 5. Si veda la figura 7.4, a destra.
Nel caso degli integrali semplici, sotto opportune ipotesi si prova la formula
Si noti però che può anche essere maggiore di , ciò che è lecito perché nel caso degli integrali semplici abbiamo definito l’integrale orientato. D’altra parte, questa formula non si prova usando direttamente le proprietà dell’integrale. Piuttosto si prova che questa formula vale per il calcolo delle primitive, e quindi anche per il calcolo dell’integrale grazie al teorema fondamentale del calcolo integrale. Mostriamo come a questa formula, sotto opportune ipotesi, si possa anche giungere direttamente dalla definizione di integrale semplice. Sia una funzione continua definita su in intervallo e sia una funzione monotona strettamente crescente da un intervallo su , che è anche derivabile. Bisogna ricordare questi fatti:
| (7.4) |
con punti qualsiasi.
Quando la finezza della partizione tende a zero, le somme (7.4) tendono all’integrale
Essendo la funzione monotona e suriettiva, ogni proviene da un unico ,
Dunque la somma (7.4) è anche uguale a
Questa non è una somma di quelle che conducono alla definizione di un integrale, ma ad essa facilmente si riconduce. Infatti, dal Teorema di Lagrange, esiste un punto tale che
Ricordando che i numeri si possono scegliere in modo arbitrario, scegliamo . La monotonia di mostra che . In questo modo la (7.4) diviene
| (7.5) |
La finezza della partizione di tende a zero se e solo se tende a zero la finezza della partizione di . Quando la finezza della partizione tende a zero, le somme (7.4) tendono all’integrale di , quelle di (7.5) tendono all’integrale di . D’altra parte le due somme hanno lo stesso valore e quindi si trova
Osservazione 209 Notiamo esplicitamente:
Ma ora e quindi riordinando l’ordine degli estremi di integrazione si trova
Vediamo ora quali problemi si incontrano nel cercare di estendere il ragionamento appena fatto a funzioni di più variabili. In questo caso dovremo avere definita su un dominio di integrazione e dovremo avere una trasformazione da un dominio di integrazione nel dominio di integrazione . La dovrà essere biunivoca da su e differenziabile (un’ulteriore condizione si dirà in seguito). L’integrale di si definisce suddividendo in tanti piccoli rettangoli, diciamo . Un rettangolo è immagine mediante di un sottoinsieme di che però non è un rettangolo. Se la è lineare è un parallelogramma, altrimenti è una figura più complessa. Ciò nonostante, si potrà tentare di ripetere gli argomenti visti sopra se:
La relazione tra l’area di e quella di è nota nel caso in cui la trasformazione sia lineare: è
Qui indica la matrice della trasformazione , calcolata rispetto a coordinate ortogonali. Nel caso non lineare una formula analoga alla precedente ancora vale, con un errore che è di ordine superiore rispetto all’area di , quando questa tende a zero. Questo risponde alla prima questione. La seconda richiesta, l’area degli tende a zero se e solo se l’area degli tende a zero, è soddisfatta quando su . Con queste informazioni, nel caso in cui sia una trasformazione lineare è relativamente facile provare il risultato seguente, mimando la dimostrazione vista sopra per il caso di funzioni di una variabile. Nel caso in cui sia non lineare, il risultato seguente vale ancora ma la dimostrazione è piuttosto complessa:
Teorema 210 Siano e due domini di integrazione. Sia
una trasformazione invertibile da su . Supponiamo che questa trasformazione sia di classe su una regione che contiene . Sia lo jacobiano della trasformazione. Supponiamo che non si annulli su . Sotto queste condizioni vale:
Come abbiamo detto, questo teorema estende il teorema di cambiamento di variabili negli integrali semplici. Nell’uso però esso ha un ruolo diverso. Nel caso degli integrali semplici il metodo di cambiamento di variabili si usa per trasformare la funzione in una di cui sia più facile trovare la primitiva. Nel caso degli integrali doppi si usa la trasformazione di variabili per passare da un dominio più complicato ad uno più semplice. Per esempio, si voglia calcolare
con la circonferanza . Esprimendo ed mediante le coordinate polari e , si trova
Notando che lo jacobiano della trasformazione è semplicemente , il calcolo richiesto si riduce a quello dell’integrale iterato
Osservazione 211 Si noti che lo jacobiano della trasformazione a coordinate polari si annulla nell’origine e quindi il Teorema 210 a rigore non può applicarsi. Si applichi però il teorema ad una corona circolare e poi si mandi a zero. Il Teorema 206 mostra che il contributo della circonferenza di raggio tende a zero e ciò giustifica l’uso delle coordinate polari per il calcolo precedente. _
Le trasformazioni di coordinate che si usano più comunemente sono le trasformazioni a coordinate polari o ellittiche nel piano, a coordinate cilindriche o sferiche nello spazio. Si ha: